141-150 of 268 results
-
Seaplane design analysis: Focus on structure factor optimization
PI Alberto Mello
CO-I Soham Bahulekar
CO-I Sergio Butkewitshch
CO-I Wesley Queiroz
In this work, a design optimization is being investigated considering possible hydrodynamic and structural advantages aiming to reduce the structure weight factor, with a trade-off between fluid dynamics and structural aspects.
Seaplanes are known to have mandatory design characteristics that lead to disadvantages in comparison to landplanes what limit their use as regular passenger commuters. The main design points to consider are that seaplanes have higher structure weight factor due to hull with its specific shape that creates higher drag than the fuselage of a landplane. They also have higher trim drag because of the need of placing the propellers far from the water surface. All these drawbacks reduce payload capability of seaplanes. In this work, a design optimization will be investigated considering possible hydrodynamic and structural advantages aiming to reduce the structure weight factor, with a trade-off between fluid dynamics and structural aspects, increasing payload capability. An optimized structure may lead to a more effective use of seaplanes as cargo or passenger commuters. A SEAMAX M-22 currently being assembled in the ERAU Research Park hangar will be used for result comparisons.
Categories: Graduate
-
Behavior of superalloys subjected to fatigue loads under high temperature
PI Alberto Mello
CO-I Paulina De La Torre Morales
CO-I Open Position - New students are welcome
This study is evaluating what initial conditions can activate cubic slip planes, then the level of accommodation and strain homogenization within the grain, and how a given initial condition affects the material behavior when subjected to operational cyclic loads under high temperature.
Ni-based super alloys are widely used in turbine engines mainly due to its high strength and fatigue resistance at elevated temperatures. One hypothesis to explain its atypical characteristic among metals is that a cross-slip mechanism is in place. The activation of {100} cubic slip systems along of the octahedral slip planes {111} in Ni-based superalloys has been verified when under high strain and temperature. The material would exhibit a more homogeneous strain distribution and less strain localization. We seek for the ideal precondition that will improve the endurance of Ni-based superalloy (IN 718) samples subjected to operational loading. We evaluate the initial conditions that activate cubic slip planes, the level of accommodation, and strain homogenization within the grain. With focus on the deformation mechanism, the sample microstructure can be fully characterized by electron backscatter diffraction (EBSD) and the slip systems, after the applied pre-condition, can be tracked via digital image correlation (DIC).
Accomplished tasks:
(a) samples’ manufacturing, (b) sample polishing and preparation, (c) furnace installation and operational tests, (d) development of laboratory procedures, equipment and microscopes (optical and SEM), (d) calibration and controller fine tuning for the MTS tensile testing machine, and (e) fatigue test with several specimens, including control samples and modified pre-conditions
Next steps:
Characterization of the microstructure of tested specimens under special conditions via EBSD to identify the slip planes and confirm or not the activation of cubic slip systems.
Categories: Faculty-Staff
-
Influence of cold expansion and aggressive environment on crack growth in aluminum alloy
PI Alberto Mello
CO-I Christopher Leirer
CO-I Ken Shishino
CO-I Open Position - New students are welcome
This research aims to establish the effect of hole cold expansion on fatigue life of pre-cracked material under aggressive environment.
This research investigates the relationship between crack propagation and secondary crack initiation in aluminum alloys with cold worked holes subjected to cyclic loads to determine the impact on fatigue life of joints in presence of aggressive environment. We work with experiments and analysis of fatigue life of bolted joints with coldworked holes in presence of galvanic corrosion. This investigation is examining the effect of local plastic deformation and localized galvanic corrosion on small cracks and fatigue life of bolted joints. The benefits of cold work are well known and its application is widely used in new and repaired structures, even in crack arrester holes. However, coldworked holes are usually fastened to dissimilar materials, what may induce localized galvanic corrosion. When applied in the field, damaged material removal in a cold work procedure may be limited to a maximum allowable diameter for reaming and finishing, what may leave micro/small cracks on the strained region. To completely understand the effect of initial cracks as a function of initial plastic deformation level in a coldworked hole it is necessary to fully evaluate strain distribution during and post cold work with microscopic detail. In a first approach, we have analyzed (FEM and classic analysis) and measured strain distribution during the process using digital image correlation (DIC). In the next step, we have tested specimens under fatigue. Pre cold work induced micro cracks was monitored in-situ via digital optical microscopy. In sequence, the coldworked holes were filled with a dissimilar material fastener in saline environment and the impact of galvanic corrosion on crack growth rate was determined for AA 2024-T3.
In a next step, we will further investigate the formation of critical secondary cracks. The probable cause could be a local corrosion around cathodic precipitates, but a detailed study is necessary to confirm this hypothesis. The tested samples must be prepared for use in scanning electron microscope (SEM) to identify the local pit formation at the plate edge, find the point of crack initiation, and determine the propagation path. Using striation counting technique, we may be able to estimate the number of cycles to failure and, consequently, the time necessary for the crack initiation under aggressive environment. Additionally, we will plan to use and analyze a special ceramic coating to mitigate galvanic corrosion effect on loaded components.
Categories: Graduate
-
Damage Control Measures in Composites: Focus on Damage Tolerance of Aerospace Structures
PI Alberto Mello
CO-I Kais Jribi
CO-I Doug Neill (C.E.S. LLC)
CO-I Jon Gosse (C.E.S. LLC)
The focus of this research is to provide advanced methods and tools to address damage tolerance in composite structure
This study is in partnership with Computational Engineering Software, LLC (http://icmedesign.com).
Critical damage within metallic structure usually takes the form of cracks. The main issue is continued growth of the cracks as a function of in-service loading conditions. Often crack growth due to cyclic loading is of interest. Damage within composite structure has a higher number of factors to represent how critical the damage is. It must be considered that:
- Single cracks rarely exist in composite laminates, if they exist do it is usually as a delamination between adherents.
- Damage usually manifests itself as a network of inter-connected delaminations and transverse cracks.
- Unlike metals, Fracture mechanics is generally not applicable to laminated damage. The Mode I, Mode II and Mode III single crack failure modes require satisfaction of similitude to be realized in composite structures.
The main question to be answered is this study is when will the damage perimeters begin to grow under operational cyclic load. To do that, we expect to accomplish the following main steps:
Obtain limiting critical values for one or more material systems.
Develop a sequence of tests to simulate damage and then measure limits to catastrophic failure in compression and/or tension.
Model each of the test articles and apply the Onset approach to predict whether (for a given applied loading environment) the damage will or will not begin to propagate.
Compare prediction of the onset of propagation to measured ultimate failure. The criterion of success is that the numerical methodology can conservatively, but realistically predict a load level below which propagation does not occur.
Categories: Graduate
-
Bird Strike - The Effect of the Leading Edge Radius on the Behavior of the Bird Upon Impact
PI Alberto Mello
CO-I Kiran Kumar Avula
CO-I James Pembridge
This project is in partnership with Gulfstream Aerospace Corporation under MMSE program.
Birds pose a major threat to aviation. Bird impact can lead to significant damage of the aircraft and can be sometimes catastrophic. For a damage tolerant design of an aircraft structure, the structure has to fulfill the airworthiness specifications prescribed by FAA or EASA.
According to FAR 25, Sub-part 25.571, leading-edge structures of large transport aircraft have to withstand an impact with a 4 lb (1.81 kg) bird (8 lb (3.62kg) for empennage leading edge) when the velocity of the airplane relative to the bird along the airplane's flight path is equal to its cruising speed (Vc) at sea level or 0.85 (Vc) at 8,000 feet, whichever is more critical.
When a bird impacts the structure, it either slides off of the impacted surface causing less damage or it creates a dent or hole due to penetration into the structure, causing significant damage. The behavior of the bird upon the impact depends on the geometrical characteristics of the structure and the velocity at which the bird impacts. When split upon impact, it results in low impact forces and thus less damage. The impact forces are higher when the bird doesn’t split upon the impact which causes more damage to the target structure as the impact forces are directly proportional to the mass of the bird.
Bird strike tests are very expensive and their number in the engine development programs should be minimized. Numerical simulations help reduce a significant amount of testing by providing valuable information in the design process. This thesis aims to develop a model using smooth particle hydrodynamics (SPH) method for analyzing aircraft leading edges for bird strikes that will correlate well with the test results and subsequently, apply the method to study the effect of the leading edge radius on the behavior of the bird (split/not split) upon the impact.
The objective is to generate sufficient data through numerical analysis to confirm the “one inch radius split/no split dividing line”, and to validate the empirical formulas used to calculate the impact forces. Overall, the goal is to save both time and money for the future generation aircraft by minimizing or eliminating the bird strike tests.
Categories: Graduate
-
Measuring Interstellar Temperature and Ionization Variations Using Observations of Faint Diffuse [OII] Emission
PI Edwin Mierkiewicz
The interstellar medium (ISM) plays a vital role in the ongoing cycle of stellar birth and death as well as galactic evolution. However the role of interstellar matter, from how its properties are influenced by stars to how, in turn, its properties influence star formation is poorly understood.
Within the past decade substantial strides have been made towards unraveling the mysteries of a major ISM component, the widespread warm ionized medium (WIM). The advances were enabled by innovative spectroscopic techniques to detect and study extremely faint interstellar emission lines in the visible spectral region. With such observations it is possible to explore the connection between the Galactic disk and halo as energy and gas are transferred away from massive star-forming regions to large distances from the midplane. An especially exciting development in this area is the evidence for temperature variations and the existence of a previously unrecognized source of heating within the WIM. The emission line of ionized oxygen in the near ultraviolet spectral region (372.7 nm) is key to exploring variations in temperature and ionization state within the gas, and for investigating the role of this additional heating. Our [OII] observations will (1) provide the only opportunity to separate unambiguously variations in temperature from variations in ionization conditions in the warm ionized medium of our Galaxy and (2) confirm whether H-alpha, [NII], and [SII] data can provide reliable temperature information about diffuse ionized gas in our own and other galaxies.Categories: Faculty-Staff
-
High Spectral Resolution Observations of Lunar Exospheric Emissions
PI Edwin Mierkiewicz
We are employing high-resolution Fabry-Perot spectroscopy of neutral sodium and potassium emission to investigate the morphology and dynamics of the lunar sodium exosphere. Likely atmosphere source mechanisms are thermal desorption, photo-desorption, ion sputtering, and meteoric impact ablation.
Their relative importance remains uncertain, both with regard to spatial and to temporal trends. Once released, sputtered gases in the lunar atmosphere can be pulled back to the regolith by gravity, escape to space, get pushed away by solar radiation pressure, or become photoionized and swept away by the solar wind. To test hypotheses about the sources, sinks, and escape of the lunar atmosphere, velocity-resolved observations under different lunar phases, altitudes, latitudes, and time histories are being made to help understand factors that link resultant morphologies to sources and solar radiation effects. These observations will help constrain atmospheric and surface-process modeling, and help quantify the source and escape mechanisms.
Categories: Faculty-Staff
-
Environmental Analysis of Convective Initiation Events in Central Florida using Integrated Mobile Observation
PI Shawn Milrad
PI Daniel Halperin
This research collaboration with the National Weather Service (NWS) Weather Forecast Office Tampa Bay aims to develop an ingredients-based methodology to help improve forecasts of first-strike cloud-to-ground lightning strikes in summer thunderstorms across Central Florida. Results will be used to construct a new forecast tool that will aid NWS forecasters in protecting the region’s life and property from these dangerous lightning events.
Lightning is a major hazard to life and property in Florida and annually leads the nation in lightning strikes and fatalities. The proposed research collaboration with the National Weather Service (NWS) Weather Forecast Office Tampa Bay aims to develop an ingredients-based methodology to help forecast first strike cloud-to-ground lightning strikes in warm-season thunderstorms across Central Florida. A comprehensive environmental analysis of these convective initiation events is being performed using numerous observational datasets, including mobile radar and surface observations from recent ERAU field courses and campaigns. The environmental analysis will examine first-strike events across the eight large-scale flow regimes previously identified by NWS Tampa Bay. A particular focus is placed on events that occurred during four weeks of ERAU field courses/campaigns in 2015 and 2018, allowing for the unique integration of mobile observations. Results are being used to construct a new forecast tool integrated with existing radar- and satellite-based lightning tools, to improve first-strike alert lead times. Also, the proposed project has established a fruitful collaborative research relationship between ERAU and NWS Tampa Bay while providing research experience and training for several ERAU undergraduate meteorology majors. These undergraduate students have completed much of the work on the project and have gotten to interact with NWS Tampa Bay personnel. It is expected that this project will also stimulate future more significant research collaborations between ERAU Meteorology and regional NWS forecast offices.Categories: Faculty-Staff
-
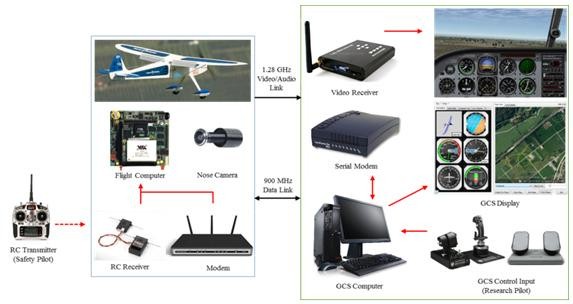
Pilot-in-the-Loop UAS Mobile Research Test-Bed
PI Hever Moncayo
CO-I May Chan
CO-I Ashwini Agrawal
CO-I Agustin Giovagnoli
This project aims to develop and implement a Mobile UAV Ground Control Station (GCS) supporting aviation safety research with pilot-in-the-loop capabilities using unmanned aerial systems platforms, in which flight conditions, such as systems failures, could be simulated in real-time to characterize pilot response, control laws performance, and human-machine and control laws interactions.
 A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.
A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.Categories: Faculty-Staff
-
Shielded UAS Operations Detect and Avoid
PI Hever Moncayo
This effort is intended to identify risks and recommend solutions to the FAA that enable shielded UAS operations
This project is funded under the FAA ASSURE program. Certain small UAS (sUAS) Beyond Visual Line of Sight (BVLOS) operations, such as structural inspection, may be in close proximity to structures that are collision hazards for manned aircraft. These types of operations that are in close proximity to manned aviation flight obstacles such that they provide significant protection from conflicts and collisions with manned aircraft are termed “shielded” operations. This effort is intended to identify risks and recommend solutions to the FAA that enable shielded UAS operations. Several topics related to this project include simulation of dynamic systems, simulation environment programming, guidance, control and dynamics, and hardware implementation.Categories: Faculty-Staff
141-150 of 268 results