111-120 of 233 results
-
Blue Origin’s Suborbital Research: MESSI/McXIMUS
PI Pedro LLanos
CO-I Sathya Gangadharan
The following studies were conducted with Co-PIs Dr. Sathya Gangadharan (ERAU) and Kristina Andrijauskaite (University of Texas Health Science Center in San Antonio [UTHSCSA]).
MESSI Summary: This project was ERAU's second suborbital payload aboard Blue Origin’s New Shepard launched May 2, 2019. We analyzed the effects of suborbital flight stressors and various light conditions (red, white, no light) on the Arthrospira platensis, commonly known as Spirulina, aboard Blue Origin’s New Shepard launch vehicle. Commercially available cyanobacterium species were cultivated and closely monitored in mother colonies several months before the flight. The aim was to estimate biomass production and growth as a potential dietary alternative for prospective human spaceflight's life support system.
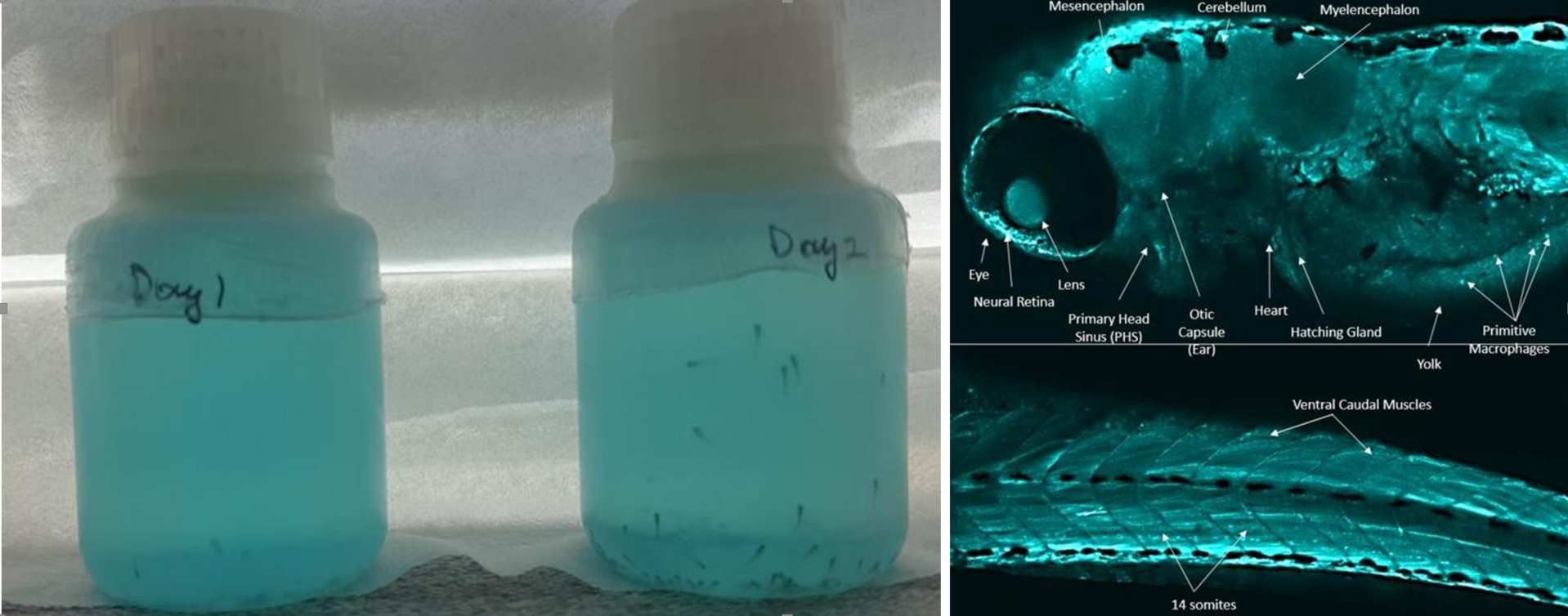
McXIMUS Summary: Zebrafish larvae were exposed to the same physiological stressors they would encounter during suborbital space flight: alterations in light, thermal, and centrifugation conditions, and their behavioral responses were analyzed using the DanioVision (Noldus) behavioral tracking system. Our results showed that zebrafish were most active when kept in a dark environment as measured by swim distance. Also, thermal alterations revealed that zebrafish larvae adapted well to the different temperatures ranging from 25°C to 32°C with the highest levels of locomotor activity observed at 32°C. Finally, the centrifugation tests demonstrated that although zebrafish were exhausted initially, their recovery process was short, lasting for approximately five minutes.
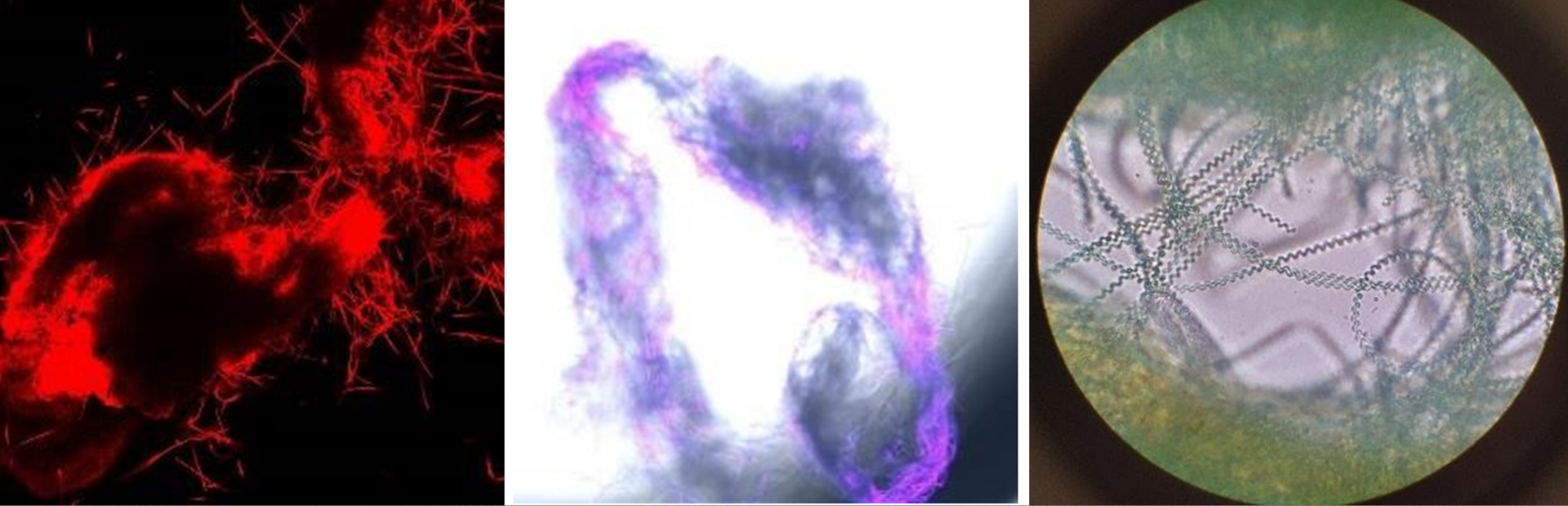
Spirulina Research: The Microgravity Experiment for Spirulina as Superfood In-Vitro (MESSI) was funded by internal funds from ERAU and UTHSCA and ERAU's 2018-2019 Ignite Research Grant. Spirulina samples were flown in a NanoLab with adjacent avionics supporting the light conditions and sensors to monitor the temperature, relative humidity, and accelerations. The various flight parameters measured in the NanoLab were validated with the flight data gathered by Nanoracks. Preliminary results of the genes affected by the temperature and light alterations are presented. Our data indicate that the spirulina samples aboard the rocket had elevated expression of most genes when compared to ground controls, especially genes related to magnesium (mgtE) and nitrate-nitrite (nrtP) transport. Furthermore, we saw the most significant up-regulation (p < 0.01-0.001) of genes from the blue-green spirulina microalgae exposed to the red light. Finally, we used laser-scanning confocal microscopy to provide high-resolution imaging visualizations of the spirulina under different conditions (ground, flight, and light conditions). Results indicate that flight samples exposed to red light had the most profound effect on gene expression and showed an enhanced behavior suggesting that photosynthetic organisms are influenced by light energy. Although it is well-known that spirulina needs light and warmth to optimally grow, our findings indicate that spirulina may be able to survive and grow with no light and at lower temperatures than optimally cultivated conditions, which may reduce hardware and resources dependency for prospective long-duration human spaceflight.
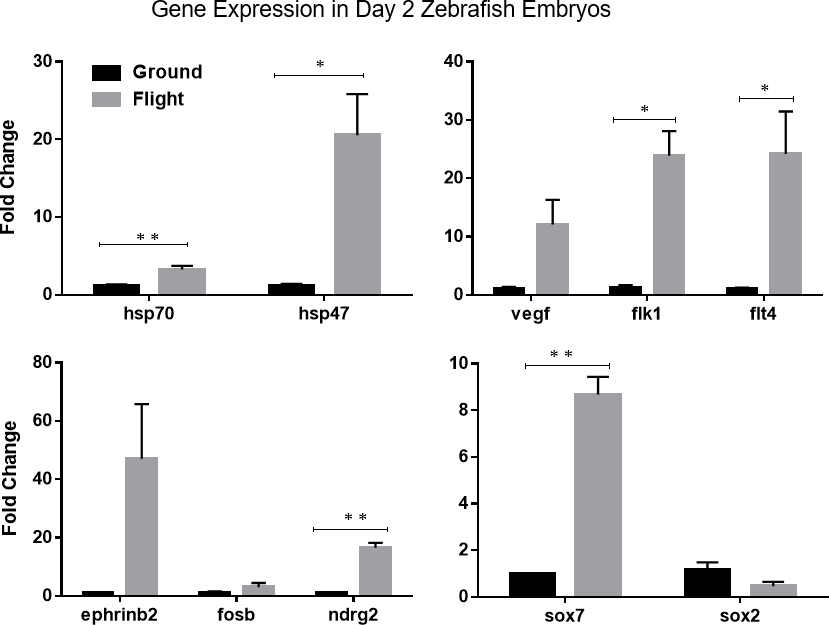
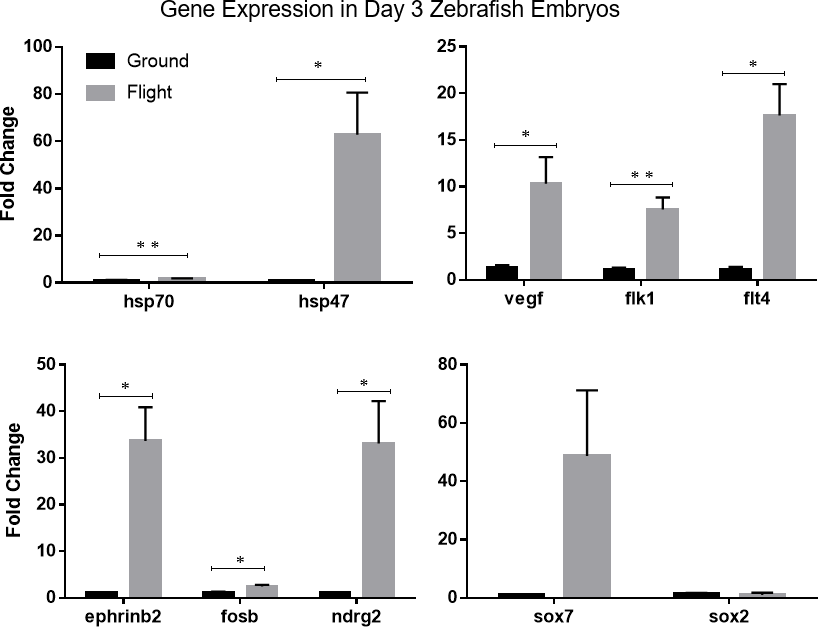
Zebrafish Research: Microgravity characterization eXperiment In Microgravity Universal Spacelab (McXIMUS). It has been proved that the presence of humans in space requires meticulous mission design and a critical understanding of physiological parameters. Space is a hostile environment that has caused numerous health hazards in astronauts, including alterations in the vascularization system and high rates of muscle atrophy. Therefore, understanding the molecular pathways mediating space-induced alterations on human physiology is a necessity in making future missions a success. The goal of this study was to use zebrafish (Danio rerio) embryos as a unique model to study molecular mechanisms of simulated and real microgravity effects on vascularization system and stress response. To simulate microgravity, we exposed zebrafish embryos to a two-dimensional clinorotation device starting 1-day postembryonic fertilization (dpf) and lasting for a maximum of four days. Changes in multiple gene expression were measured by qRT-PCR. Thus, we used the KDRL- BSY zebrafish strain with the blue fluorescently labeled vascular system allowing to image vascularization development using confocal microscopy. Our preliminary results indicate that only a small proportion of genes are affected by clinorotation. Our next goal was to confirm our findings by exposing zebrafish embryos (days 2 and 3 dpf) to microgravity during the suborbital flight aboard Blue Origin’s New Sheppard vehicle in the spring of 2019. Our project entitled Muscular characterization in Microgravity Universal Spacelab (McXIMUS) is a joint research collaboration between the Embry- Riddle Aeronautical University (ERAU) and the University of Texas Health Science Center in San Antonio (UTHSCSA). To ensure a safe environment for zebrafish embryos during the suborbital flight, we designed a NanoLab to guarantee stable thermal conditions inside the payload. Our team has established proper procedures and validation checks to maximize the outcome of this novel scientific experiment. Our data indicate that in contrast to clinorotation, zebrafish embryos exposed to suborbital flight had the up-regulated expression of multiple gene families, with the most profound effect observed in vascular endothelial growth factors and heat shock proteins. To the best of our knowledge, this is the first time when Danio rerio was flown on the suborbital flight mission to assess microgravity-induced alterations on the vascularization system and stress. Here, we present only the preliminary results of our ongoing gene expression analysis, as we are further elucidating the possible mechanisms of action. Findings from this experiment give insights into molecular pathways mediating vascular system and stress response and will assist in mapping out the strategies aimed to minimize the antagonizing effect of space travel in humans.

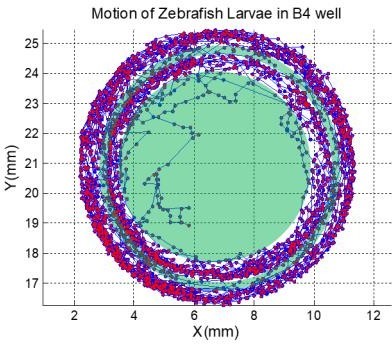
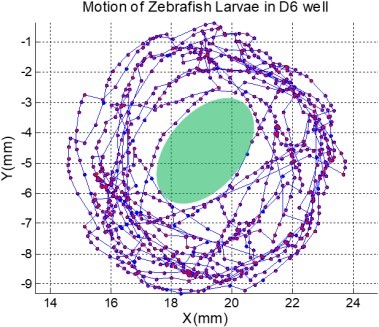
Below: Zebrafish physiology affected by stressors (light, thermal, centrifugation), and the effect of suborbital flight on gene expression.
Below left: New Shepard’s Capsule. Below right: NanoLab science experiment with zebrafish embryos and spirulina.

Below left: Flight Zebrafish embryos. Below right: Confocal microscopy of zebrafish.
Below: Confocal microscopy of spirulina flight samples.
Categories: Faculty-Staff
-
Aviation/Aerospace Research: Suborbital Space Flight Simulator
PI Pedro LLanos
CO-I Erik Seedhouse
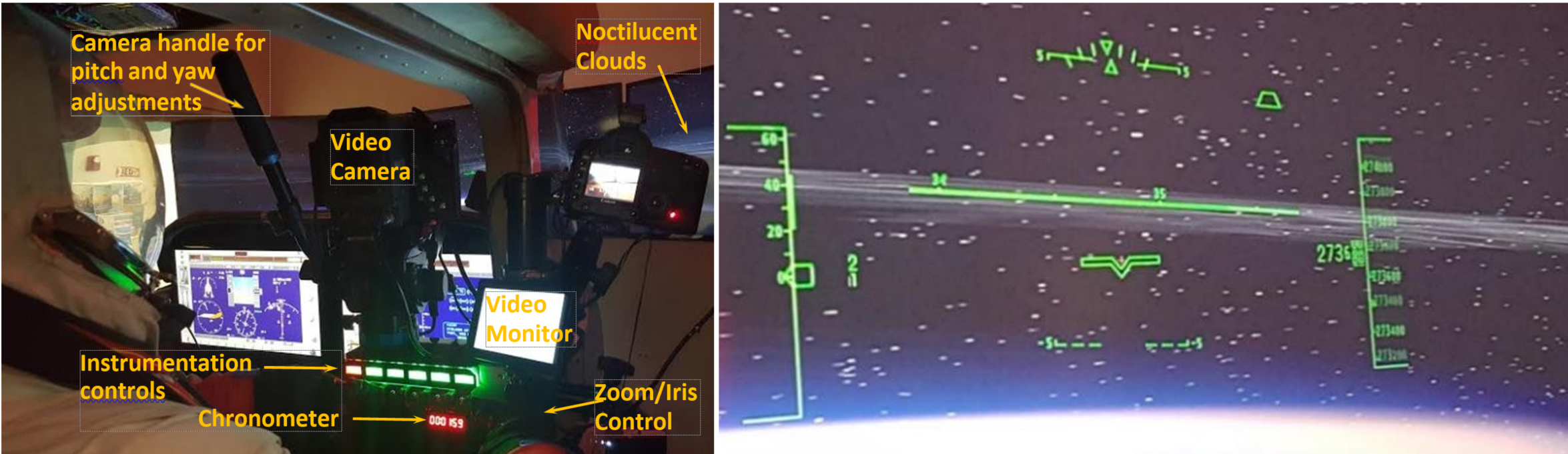
The Suborbital Space Flight Simulator (SSFS) replicates in-vehicle parameters of a suborbital launch vehicle. These suborbital missions can be monitored from the Mission Control Center (MCC). These flight parameters include the size, general layout, and typical system indicators for a suborbital spaceflight mission, as well as an approximate replication of the visuals that would be seen on a suborbital spaceflight mission. The SSFS can be configured to replicate the mission profile and layout of multiple suborbital launch vehicles. The SSFS records 56 flight data parameters that can be used for studies. The SSFS can potentially be used by multiple organizations, with multiple capabilities.
This research will help students and researchers to use SSFS-generated data to improve their understanding of the fundamentals of suborbital space flight, improve the confidence levels of this research tool for training purposes, and generate large datasets of suborbital missions that can be used for flight operational quality assurance (FOQA). By analyzing these simulated suborbital flights, it will be possible to learn a great deal about the different parameters of various suborbital trajectories and assess pilot performance.
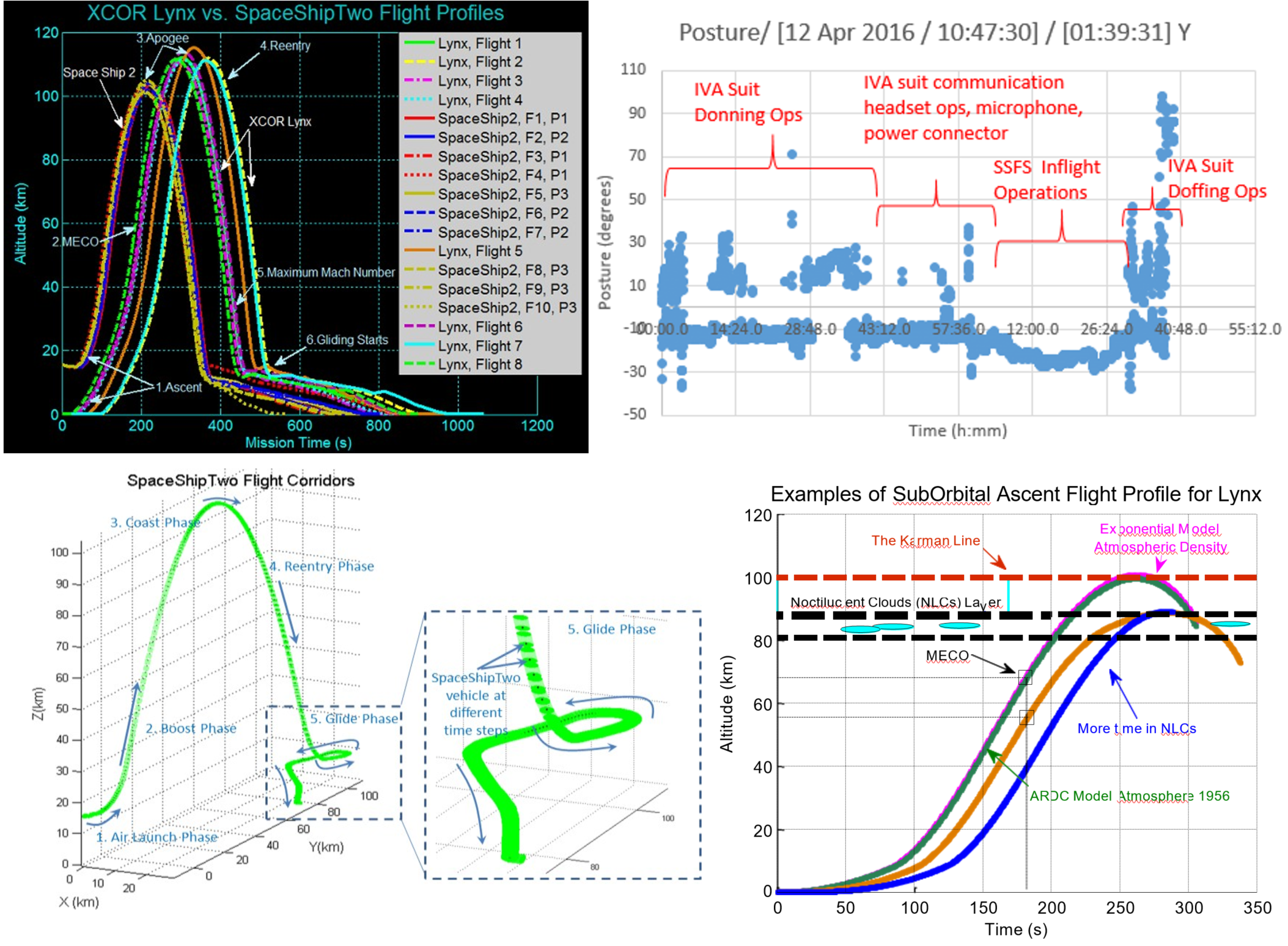
It will also be possible to assess metrics aligned with the flight profile and to determine difficulties the pilot encountered when flying nominal and off-nominal profiles. Some of these difficulties are addressed herein and displayed in a graphical context to assist the reader’s visualization. This research capability enhances our understanding of some key factors, such as winds effects, trajectory, and vehicle parameters variations to streamline the space vehicle operations and enhance science in the upper mesosphere at about 85 km, where different types of science activities can be conducted, such as neutral dynamics, gravity waves, tides, oscillations, and noctilucent clouds imagery and tomography. Understanding these effects is crucial to refine current space operations and establish more robust procedures. These procedures will involve training new space operators to conduct and coordinate space operations in class E above FL600 airspace within the Air Traffic Organization (ATO). Space vehicles such as SpaceShipTwo can spend up to 6 minutes in class E airspace above FL600 after launch. Most of this time is dedicated to science data collection in microgravity and maximizing the science is a key priority. Typical suborbital trajectories cut through the noctilucent cloud layer in the mesosphere region from about 260,000 feet to 280,000 feet during the ascent and descent. This space activity falls within the D-layer of the ionosphere (50-90 km). In each of these segments, the space vehicle spends about 10 seconds in the region of interest, totaling about 20 seconds of total in-situ uninterrupted science in the mesosphere. The SSFS is an important tool to evaluate key functional data parameters that must be considered for suborbital spaceflight participants wearing pressurized suits for intravehicular activity (IVA) from Final Frontier Design’s (FFD) fully pressurized third-generation spacesuit as part of their training. Zephyr BioHarness, BioRadio instrumentation, and Hexoskin smart shirt can be used to collect biometric response data from the participants as they performed their duties inside the SSFS.The SSFS is also equipped with MCC with several consoles, such as Flight (Director), Surgeon, Weather, Integrated communications officer, and Air Traffic Control.
Images below: Mission Control Center and Suborbital Space Flight Simulator


Images below: Examples of suborbital trajectories with several space vehicles. Some of these trajectories can be used to maximize science operations
Categories: Faculty-Staff
-
Blue Origin’s Suborbital Research: CRExIM
PI Pedro LLanos
CO-I Sathya Gangadharan
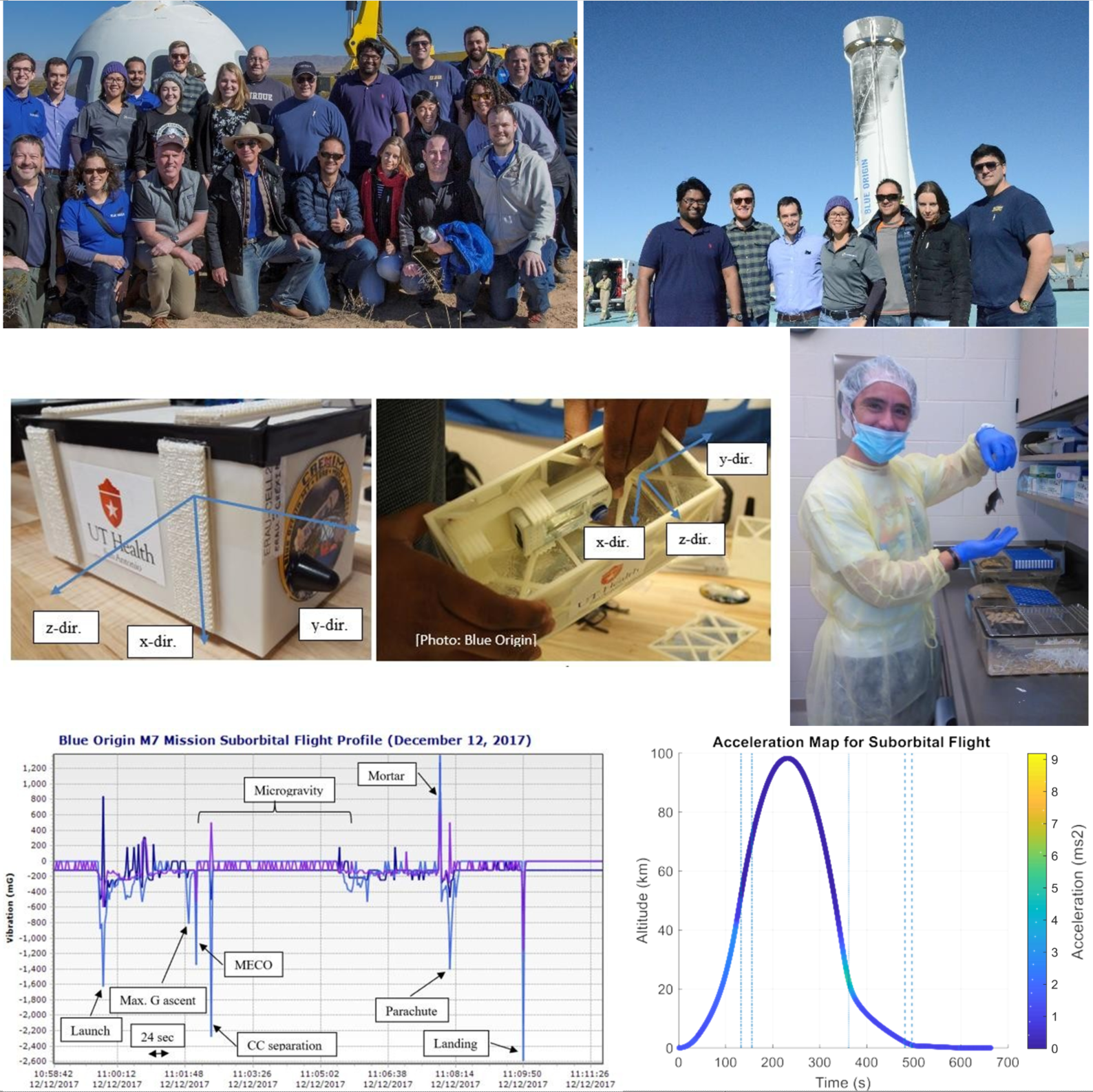
This research conducted with Co-Investigators Sathya Gangadharan (ERAU) and Kristina Andrijauskaite (MUSC/UTHSCSA), funded by ERAU’s Faculty Research Development Program, was ERAU's first suborbital payload aboard Blue Origin’s New Shepard launched December 12, 2017. The main aim of this research was to investigate the effect of microgravity on T-cells and to understand how this research could be used to develop T-cell-based therapeutics for cancer patients. A second goal was to monitor the environment that T-cells encountered during suborbital flight. The recorded data will be used to better understand the behavior and functionality of the T-cells when exposed to different stressors.
Suborbital space research is emerging as a popular platform to conduct scientific experiments. It has many advantages compared to research on the International Space Station (ISS), such as cost-effectiveness, rapid turnaround, and an opportunity to valid payloads before investing in more costly space laboratory environments. There have been many initiatives by NASA to accelerate this research, such as the release of the Space Biology Plan for 2016-2025, aimed to investigate the biological effects of long-term exposure to the space environment. Therefore, our scientific findings will build upon current research to expand the knowledge on the microgravity effect on T-cells and will also establish a baseline for us to compare future findings from subsequent suborbital flights aboard various research platforms.
This research project was a joint collaboration between the College of Aviation and the College of Engineering at ERAU and The University of Texas Health Science Center at San Antonio (UTHSCSA) and Medical University of South Carolina (MUSC) who worked on the preparation of the translational science research project aimed at investigating the effect of microgravity on the T-cells of a murine model. Cell Research Experiment In Microgravity (CRExIM) was launched aboard Blue Origin’s New Shepard suborbital vehicle on Tuesday, December 12, 2017, from the West Texas Launch Site in Van Horn, Texas. One of the aims of this science experiment was to assess the effects of microgravity on murine T-cells during suborbital flight. These cells were placed in a NanoLab with a data logger which sensed the acceleration, temperature, and relative humidity during pre-flight, flight, and post-flight operations. Some discrepancies in sensor measurement were noticed and these errors were attributed partly to the difference in sampling rates and partly to the different location of the sensors, which made it difficult to obtain highly accurate measurements of the accelerations and to correlate both sets of data. This research provides setbacks and lessons learned which made our team find new alternatives while meeting all milestones as mandated by NanoRacks and Blue Origin. This research highlights these alternatives which lead to the success of the mission and gives recommendations that will enable customers to alleviate some of these challenges in future flights.
Preliminary results suggest that suborbital space flight modulated the expression of certain subpopulations of T-cells, especially CD4+ and CD8+ cells. Thus, we have also observed the functional differences between the flown T-cells and the ground controls. Our scientific experiments and data analyses were conducted at Dr. Wargovich’s laboratory at UTHSCSA using the flow cytometry core facility. In addition, we have performed a complex cytokine expression analysis using the Invitrogen Mouse Custom ProcartaPlex 5-plex.
Below top: Our team with Blue Origin and NanoRacks teams. Below bottom: Our payload and data collected during the suborbital flight.
Categories: Faculty-Staff
-
Rocketry as Testing Platforms for Payloads
PI Pedro LLanos
CO-I Sathya Gangadharan
Design, assemble and launch small rockets as testing platforms to test small payloads which are flown aboard suborbital flight vehicles. We have successfully launched Level 1, Level 2 rockets, and we are in the process of finalizing the Level 3 rocket.
Practical experience for students in rockets and payloads is very valuable in the space industry, and it is something that would give them an advantage over other applicants. Students in Embry-Riddle Aeronautical University’s Payload and Integration class were given the opportunity to build Level 1 and Level 2 rockets and gain experience developing, testing, and integrating payloads into a rocket. These payloads were then flown to suborbital space aboard Blue Origin’s New Shepard.
Embry-Riddle Aeronautical University has launched several suborbital scientific payloads aboard Blue Origin’s New Shepard in 2017 and 2019. Students continue gaining hands-on experience in rocket design and construction, and payload integration, and testing of future and more mature payloads to be launched into space.
This research project funded by the College of Aviation Department of Applied Aviation Sciences and ERAU Ignite research grants, a Level 3 Rocket is being designed and developed at ERAU to serve as a scaled-down model research platform for launching and testing of payloads that will be later flown in commercial suborbital platforms such as Blue Origin’s New Shepard and PLD space Miura 1 rockets. Computer simulations were conducted to calculate the key parameters such as flight trajectory profiles, stability, and flight velocities for different rocket motors configurations. A preliminary design of the rocket was developed using Computer-Aided Design (CAD) software. The rocket will accommodate multiple payloads (Cubesats, NanoLabs, TubeSats) designed and developed in the Payload Applied, Technology and Operations (PATO) laboratory. The rocket is primarily constructed of carbon fiber composite as it has a high strength-to-weight ratio. Monte Carlo simulations are used to select a suitable motor for the rocket according to the flight requirements and landing restrictions.
Images below: Level 1 and Level 2 rockets


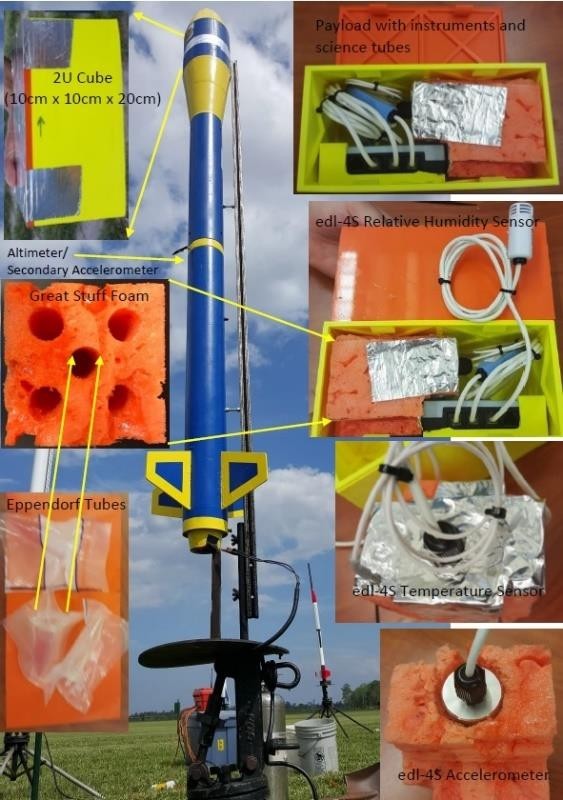
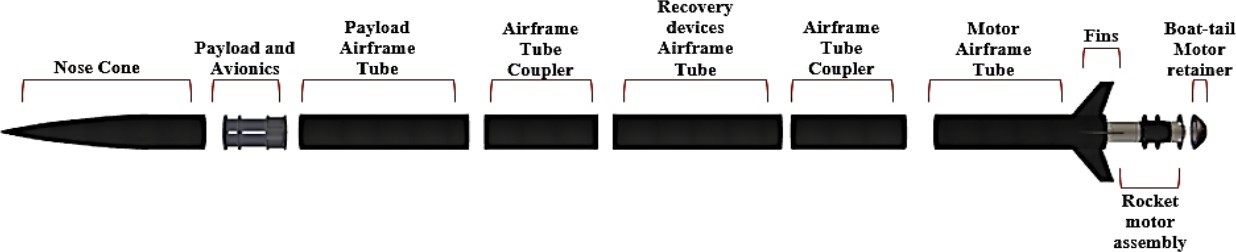
Images below: Construction of level 3 rocket. Payload bay housing several CubeSats, NanoLabs and TubeSats.

Categories: Faculty-Staff
-
NASA’s Embry-Riddle High-Altitude Science Experiment Rig (ERHASER)
PI Pedro LLanos
CO-I Sathya Gangadharan
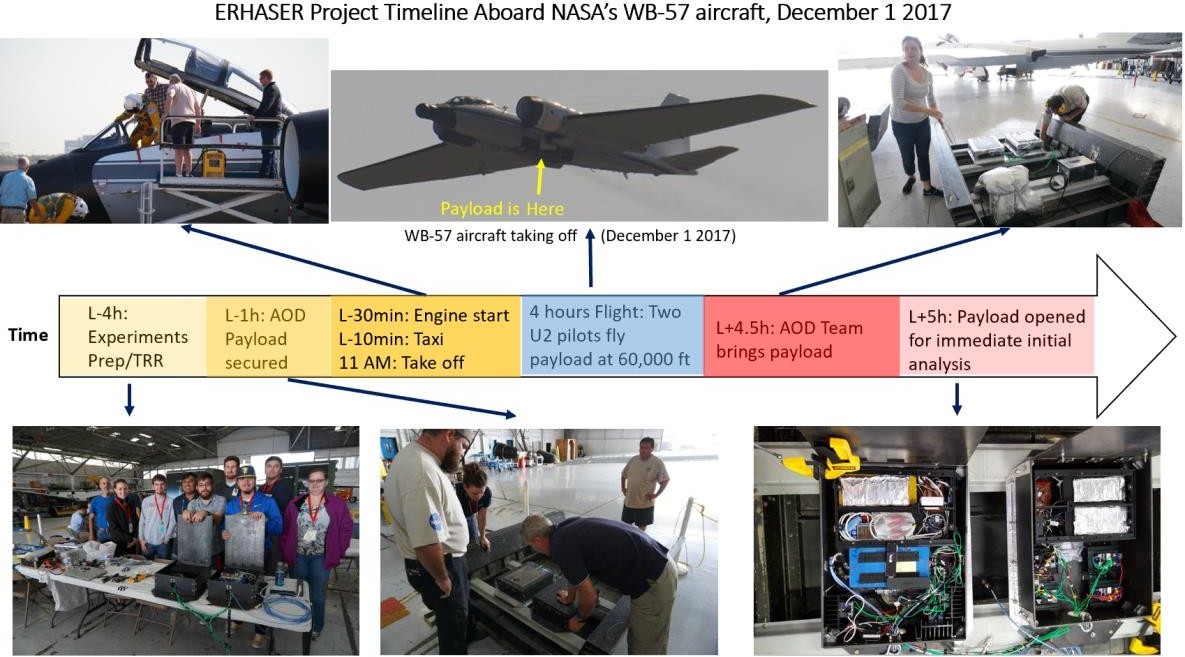
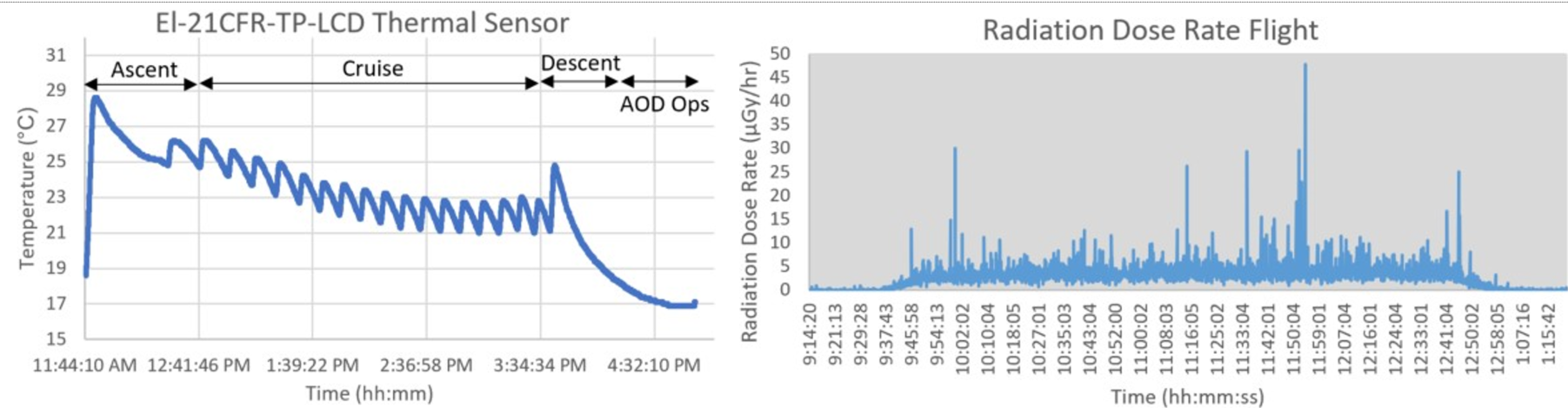
The purpose of this study aboard the NASA’s Airborne Science Program WB-57 aircraft was to assess the effect of radiation on murine naïve and activated T lymphocytes (T cells) and to test the effectiveness of thermal, radiation and flight tracking technology in biological scientific payloads. Flight cells were kept under proper environmental conditions by using an active thermal system, whereas the levels of radiation were measured by NASA’s Timepix radiation sensor during ascent, cruise at 60,000 feet, and descent.
Exposure to space radiation may place astronauts at significant health risks. This is an under-investigated area of research and therefore more knowledge is needed to better plan long-term space missions. We cultured cells in specific cytokines known to increase their viability and exposed them to either flight or had them as ground controls. In addition, an Automatic Dependent Surveillance-Broadcast (ADS-B) device was utilized to track the state vector of the aircraft during flight. The aims of this pilot research study were:
Aim 1: The first aim was to study the position of the aircraft using the ADS-B device for subsonic or supersonic flights through triangulation from communication nodes along the Gulf of Mexico, which had never done before. We aimed to get insights into some challenges the Federal Administration Aviation (FAA) is facing with integrating the newly emerging era of suborbital space vehicles into the National Air Space.
Aim 2: The second objective was to test the effects of radiation using the Timepix, a sensor that had flown on NASA’s Exploration Flight Test (EFT)-1 On December 5, 2014, and that had never flown before aboard this aircraft to study the radiation levels at 60,000 ft.
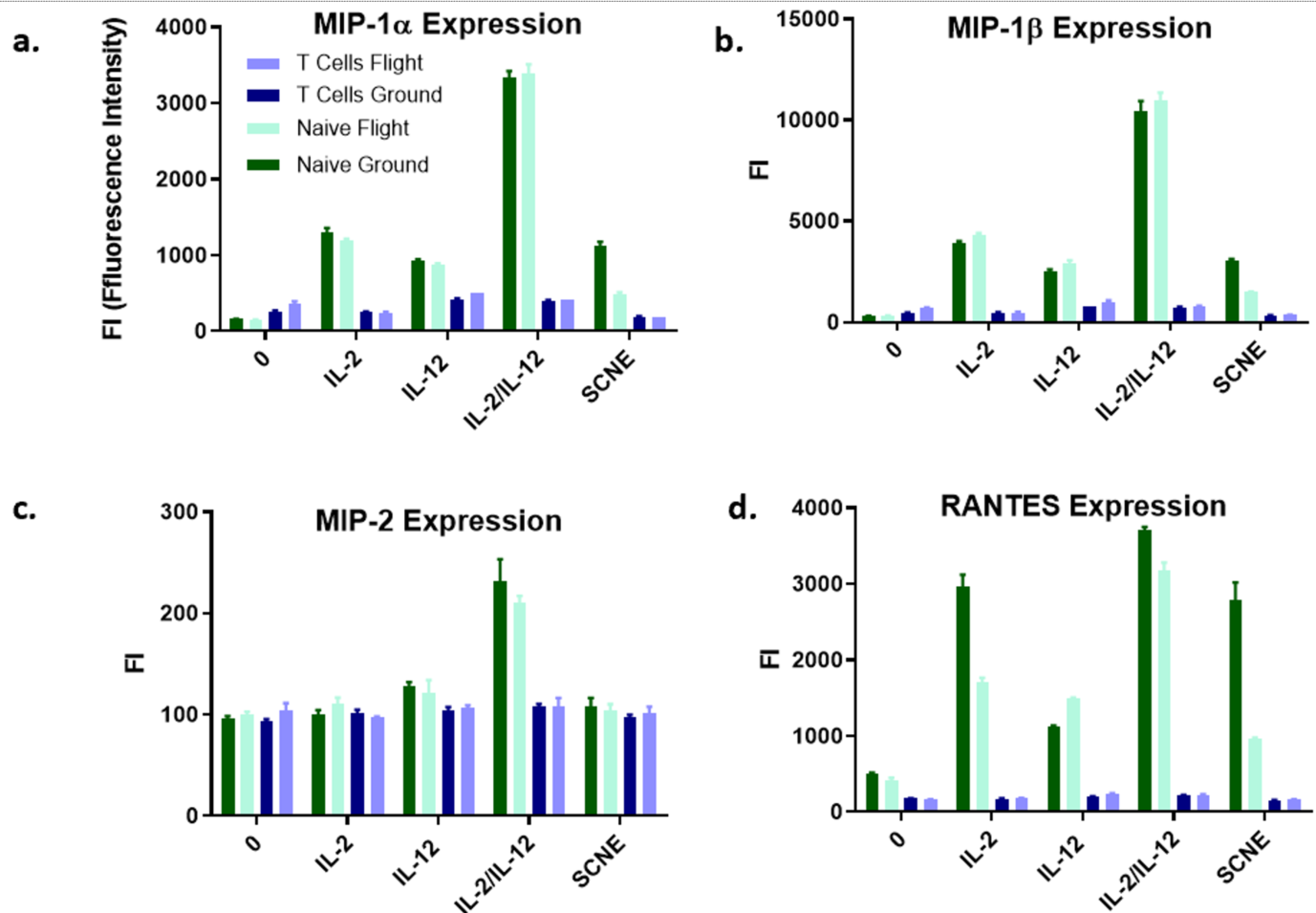
Aim 3: Next, we wanted to assess the radiation levels on the immune cells, also called T cells. We used both naïve and activated murine T cells, which were supplemented with cytokines IL-2 and IL-12, as well as treated with the novel supercritical CO2 extract of neem tree Azadirachta indica (SCNE). Interleukin-2 (IL-2) is a potent T cell growth factor used for T cell expansion and treatment of several types of cancer [23]. IL-12 is involved in the differentiation of naive T cells into the T helper cells. It is also known as a T cell-stimulating factor, and a promising agent in cancer immunotherapy [24]. These two cytokines facilitate their effect by targeting the immune system. We sought to investigate whether exposure to radiation and other flight stressors would have any effect on these cells, especially at the 60,000 feet, where peak galactic cosmic rays (GCR) scattering of secondary particles occurs. Given the cytokines' ability to alter the cellular processes and the role of supercritical extract as the natural compound with pluripotent properties, we wanted to test whether supplementing cells with these additives would rescue the cells of radiation damage. We performed the phenotypic analysis of the cells and assessed their ability to release cytokines.
Aim 4: The fourth objective included the development of an Environment Control Life Support System (ECLSS) NanoLab, which could be used to host and sustain the cells at the desired temperature while other variables are being tested.
Below: Timeline of the airborne research experiment.
Below left: Temperature profile during flight. Below right: Total radiation dose during flight.
Below: Example of effects of flight on the expression of cytokines of T cells and Naïve cells.
Below: ERAU team picture at NASA’s Ellington Field, Houston, Texas, 2019.
Categories: Faculty-Staff
-
REU Site: Exploring Aerospace Research at the Intersection of Mechanics, Materials Science, and Aerospace Physiology
PI Foram Madiyar
CO-I Alberto Mello
This Project is founded by National Science Foundation, under REU site. This project aims to educate students and promote scientific research in materials and aerospace science that encompasses not only building lighter and smarter materials for aerospace applications but also understanding the impact of the space environment on physiological and biological changes.
This Site will focus on multidisciplinary research in aerospace engineering, chemistry, and applied space biology with a goal of improving future space materials science and human diagnostic technology by exposing students to the challenges in these areas and the research going on to solve them. Undergraduate students for a ten-week summer will be recruited for the program. The student recruitment will start in Nov 2021 and the first summer research will be held in the period of May 16 to July 18, 2022.
The ERAU-REU program is dedicated to the ideals of diversity, equity, accessibility, and inclusion and we ensure a safe and comfortable environment for all scholars. Please contact us if you have any questions or concerns about the housing accommodations or other aspects of the program.
Students from underrepresented groups in the sciences, veterans, disabled, or are early in their undergraduate coursework (rising sophomores or juniors) are especially encouraged to apply.
Research Areas:
1 - Additive Manufacturing of Shape-Stabilized Phase-Change Materials (PCMs)
Mentor: Prof. Sandra Boetcher (https://faculty.erau.edu/Sandra.Boetcher)
The goal of the proposed research is to manufacture shape-stabilized PCMs via additive manufacturing.
2 - Space Radiation: Study of Intracellular Reactive Oxygen Species
Mentor: Prof. Hugo Castillo (https://faculty.erau.edu/Hugo.Castillo)
The goal of this project is to produce a standardized technique to measure the intracellular concentration of ROS in different species of bacteria and yeast, in relation to chronic exposure to sub-lethal doses of ionizing radiation using a low-dose gamma irradiator allowing to quantify the oxidative stress status of the cell concerning DNA damage.
3 - Investigating Micro- and Nano-Plastics in the Confined Environment of Space Flight.
Mentor: Prof. Marwa El-Sayed (https://faculty.erau.edu/Marwa.ElSayed)
The proposed study aims to characterize atmospheric MNP in indoor environments. The goals of the study are 1) identification of the sizes, shapes and size distribution of MNP in the atmosphere, 2) characterization of the chemical composition of atmospheric MNP, 3) determination of the degradation processes and 4) identification of the health issues associated with these particles.
4 - Investigation of Space Biomechanics and Additive Manufacturing of the Orthopedics
Mentor: Prof. Victor Huayamave (https://faculty.erau.edu/Victor.Huayamave)
The participants will learn about (1) current state of space biomechanics research, (2) segmenting anatomical images to develop finite element models, and (3) 3D printed components using additive manufacturing. The computational pipeline will be introduced to the predictive power of the FEM to assess the structural integrity of the hip joint under microgravity conditions.
5 - Fabrication of a Flexible, Stretchable, and Self-Healable Platform for Aerospace Applications
Mentors: Prof. Foram Madiyar, Prof. Daewon Kim (https://faculty.erau.edu/Foram.Madiyar, https://faculty.erau.edu/DaeWon.Kim)
The goal of this project is to investigate the use of polymers not only having tunable electrical and thermal properties, but also reversible bond chemistry that imparts materials high stretchability, exceptional toughness, and self-healability.
6 - On-Site Biomarker Sensing using Flexible Transistors on Skin
Mentor: Prof. Foram Madiyar (https://faculty.erau.edu/Foram.Madiyar)
The goal of the project is to design a wearable technology for the real-time screening, diagnosis and multiplex detection of different biomarkers.
7 - Biofidelic Piezoresistive Nanocomposite Multiscale Analysis
Mentor: Prof. Sirish Namilae (https://faculty.erau.edu/Sirish.Namilae)
In the proposed research, we will further engineer the electro-mechanical response of the structure through (a) varying the constituents in the silicone matrix and (b) engineering the interface mechanical properties in the core layer.
8 – Fractography using Scanning Electron Microscopy
Prof. Alberto Mello (https://faculty.erau.edu/Alberto.Mello)
This research aims to cover scanning electron microscope (SEM) operation, including energy dispersive spectroscopy (EDS) and stress analysis. The student will cut and prepare fractured specimens, observe the crack surface under SEM to identify the local pit formation at the plate edge, find the point of crack initiation, and determine the propagation path.
9 - Investigation of Photoresponsive and Thermally Stable Monomeric Structures for Space Applications
Mentor Prof. Javier Santos (https://faculty.erau.edu/Javier.SantosPerez)
The goal of the project is to investigate the photoresponsive and thermally stable monomeric structures to sense damage, fractures, and changes to space infrastructures.
10 - Investigating Methods to Minimize the Gap between Pre and Post-Space Flight Syndrome
Mentor: Prof. Christine Walck (https://faculty.erau.edu/Christine.Walck)
We propose to design an optimized lower extremity force acquisition system (LEFAS) that integrates with a lower-body negative pressure (LBNP) box and subject-specific protocols for improved fitness results by taking a computationally simulated optimization approach.
Categories: Faculty-Staff
-
JET-AIRFRAME INTERACTIONS FOR NOISE SUPPRESSION
PI Reda Mankbadi
JET-AIRFRAME INTERACTIONS FOR NOISE SUPPRESSION
The Embry-Riddle team developed a passive noise suppression technology utilizing the interactions of the airframe with the jet plume. In this technology, the flat surface of the airframe adjacent to the jet plume is modified to create a slightly wavy surface instead. Such design modification can be applied to the existing design concepts with engine mounted under the wing, as well as, the top-mounted engine configurations.
The near-field perturbations are reflected by the wavy surface to create an excitation wave to amplify the jet and the shear layer instability. The wavy-surface parameters are designed such that the excitation frequency is the harmonic of the fundamental frequency responsible for the peak noise. Through nonlinear fundamental-subharmonic interaction, the sound source and its radiated far-field noise are reduced.
To verify this concept, high-fidelity simulations of a supersonic rectangular jet in the vicinity of the airframe surface were carried out. Results show that when the flat airframe surface is reduced by a wavy one, the radiated sound was reduced by 3.7dB for top-mounted engine, and by 2.6dB for under-airframe engine.


Implemntation of wavy surface design to suppress jet-surface interaction noise.
(Left) Top-mounted engine configuration, (Right) Conventional enginr-under airframe design


Acoustic spectra at the far-field observer 42 diameters away from the nozzle exit
(Left) Engine mounted on top of airframe, (Right) Engine mounted under the wing
Categories: Faculty-Staff
-
E-cigarette nicotine deposition and persistence on glass and cotton surfaces
PI Cheri Marcham
CO-I Beverly Wood
CO-I Evan Floyd
CO-I Susan Arnold
This study examined whether nicotine from electronic cigarette aerosols deposits on indoor surfaces and how long it persists. Using controlled chamber experiments, the research demonstrated that nicotine readily deposits on both glass and cotton surfaces and remains detectable for several days, with substantially longer persistence on cotton materials, indicating potential for thirdhand nicotine exposure.
In a laboratory chamber study, glass and cotton (terrycloth) surfaces were exposed to electronic cigarette aerosol for one hour and then monitored for nicotine persistence over a 72-hour period. Surface nicotine concentrations were measured at multiple time points using GC/MS analysis and modeled to estimate decay rates by material type. Results showed significantly higher initial nicotine deposition and longer persistence on cotton compared to glass, with modeled return to background levels occurring after approximately four days for glass and sixteen days for cotton. These findings suggest that nicotine from e-cigarette aerosols can persist long enough on indoor surfaces to contribute to potential thirdhand exposure and warrant further investigation into chemical transformation and health implications.Categories: Faculty-Staff
-
Fundamental Experimental and Numerical Combustion Study of H2 Containing Fuels for Gas Turbines
PI Scott Martin
This project is a University Turbine Systems research grant funded by the Department of Energy. In collaboration with the University of Central Florida, Purdue University and the University of New Mexico, Embry‑Riddle will develop fundamental data and modeling of H2 and NH3 fuels for gas turbine power plants.
Categories: Faculty-Staff
-
Human Factors Awareness Training for FAA Aviation Safety Specialists Within Aircraft Certification and FAA Flight Standards
PI Scott Martin
In this project, which is funded by the FAA, Embry‑Riddle and Kent University will develop training for individuals within the FAA’s Aviation Safety Flight Standards Service who have expertise and job responsibilities related to the evaluation of aircraft systems design, maintenance, operations, procedures and pilot performance.
Categories: Faculty-Staff
111-120 of 233 results