241-250 of 278 results
-
Integrated Communication and Environmental Sensing for Safety-Critical Autonomous Systems
PI Thomas Yang
PI Siyao Li
Current communication networks with transmitter/receiver nodes can provide large-scale area coverage and robust interconnection between nodes. This allows for the seamless integration of sensing functions into the existing communication framework, paving the way for Integrated Communication and Sensing (ICAS). Unlike previous generations that treated communication and sensing separately, ICAS eliminates the need for additional hardware, extra transmit power, or dedicated frequency bands, by enabling communication signals to support data transmission and environmental sensing simultaneously. This convergence makes ICAS a key feature of six-generation (6G) communication and enables advanced applications, including Unmanned Aerial Vehicle (UAV) missions, autonomous driving, surveillance, and smart cities, to be powered by a single transmitted signal.
This project aims to develop a novel ICAS framework tailored specifically for autonomous systems operating in safety-critical environments. The primary focus is enabling environment sensing by systematically analyzing the received information-carrying communication signals, through line-of-sight and/or reflected and scattered paths.
Categories: Faculty-Staff
-
Intelligent signal processing for secure mobile wireless communications with spectrum and energy efficiency
PI Thomas Yang
In modern wireless communications, scenarios often arise in which the receiver is required to perform detection of multi-user transmissions on the same channel or suppress co-channel interferers. In these scenarios, signal separation techniques based on statistical properties can be highly effective.
In modern wireless communications, scenarios often arise in which the receiver is required to perform detection of multi-user transmissions on the same channel or suppress co-channel interferers. In these scenarios, signal separation techniques based on statistical properties can be highly effective. However, for wireless systems operating in highly dynamic environments (such as mobile and vehicular communications), the rapidly time-varying channel condition remains a major challenge for block-based signal processing, in which the estimation of statistical properties is performed through averaging over a block of data samples. When the channel parameters change with time, long blocks mean substantial variation of mixing matrices within each block, which inevitably degrades the source separation performance. On the other hand, short blocks render the estimation of signals’ statistical properties inaccurate and biased, thus resulting in poor estimation performance.
We addresses the above-mentioned challenge via the adoption of signal separation algorithms specifically designed for dynamic channel conditions, and artificial data injection applied to short processing data blocks in wireless receivers. Through theoretical and simulation studies, we concluded that the data injection method has great potential in improving signal detection accuracy and/or processing speed for multi-user detection in wireless receivers under dynamic channel conditions. The physical layer security of these mobile communication systems is also being addressed. The research is supported by Air Force Research Laboratory’s Information Directorate (AFRL/RI).
Categories: Faculty-Staff
-
Fabrication of Copper Lithium-ion Battery Case with Integrated Cooling Channels Using Binder Jetting Additive Manufacturing
PI Yue Zhou
CO-I Wenhao Zhang
CO-I Heer Patel
CO-I Henil Patel
CO-I Sirish Namilae
This project leveraged binder jetting processes to directly fabricate metallic battery cases integrated with various cooling channels, paving the way for the additive fabrication of metallic thermal management devices applied in the aerospace field.
Findings: Developed heat transfer model for the geometrical design of cooling channels, created files for experimental design and optimized printing & sintering settings, created scale-down prototypes for battery cases with integrated cooling channels.
Categories: Faculty-Staff
-
Media Literacy and Online Critical Thinking Initiatives
PI Diane Zorri
CO-I Ann Phillips
CO-I Daniel Gressang
CO-I Matthew Sharp
CO-I Mihhail Berezovski
CO-I Rachel Silverman
CO-I Steven Master
This project proposes a train-the-trainer professional development program for Volusia county’s secondary school educators to co-opt pedagogical tools and methods that challenge online violence mobilization narratives, increase awareness of violent extremist messaging and recruiting, and increase the capabilities of targeted populations to resist and counter messaging.
Participants of Embry-Riddle Aeronautical University’s train-the-trainer seminars will identify problematic online and media messages that could lead to radicalization to violent extremism, critically evaluate the problematic assumptions, data, or logic of those messages, and develop pedagogical strategies for teaching their own students to recognize and critically evaluate those messages. This applicant fulfills the grant program priority to achieve diversity of project type.Categories: Faculty-Staff
-
Wireless Communication Testbed for Internet-of-Things Research
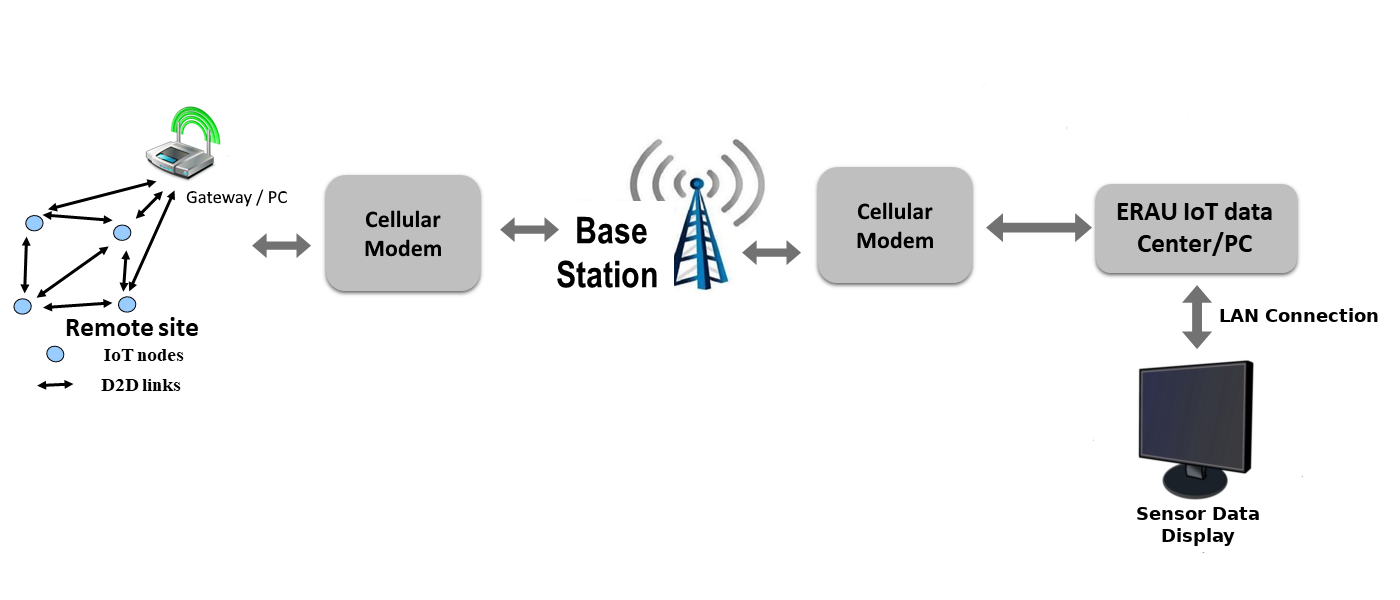
Research work to develop Wireless IoT Testbed at ERAU – Prescott campus. The testbed developed currently has three nodes, and is being used for Research and Teaching (EE424-Wireless Communications).
Sponsor: Embry-Riddle Aeronautical Univ. (ERAU), Faculty Innovative Research in Science and Tech. (FIRST), grant#13462.
Budget & Role: $25,000, Principal Investigator
Categories: Faculty-Staff
-
Microfluidic Chip & Magnetic 3D Bioprinting Research
Breast and colon cancer are the leading causes of death in developed countries (e.g., U.S.) and are highly associated with numerous risk factors including genetics, diet, obesity, cigarette smoking, hypertension, stress, and spaceflight stressors. Despite advances in the diagnosis and treatment of cancer, the mortality rates are still high and the potential mechanisms driving the metastatic potential of the cancer cells are still not well characterized.
Categories: Faculty-Staff
-
Flexible Body Control Using Fiber Optic Sensors (FlexFOS)
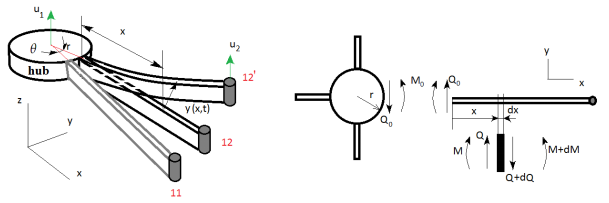
The objective of this research is to provide a precise measurement and robust control framework using fiber optic strain sensors for the total motion of rigid body and flexible body components.
Categories: Graduate
-
Development of an SE(3)-based Rigid Body Pose Estimation Scheme for Unknown Moments of Inertia in a Spacecraft
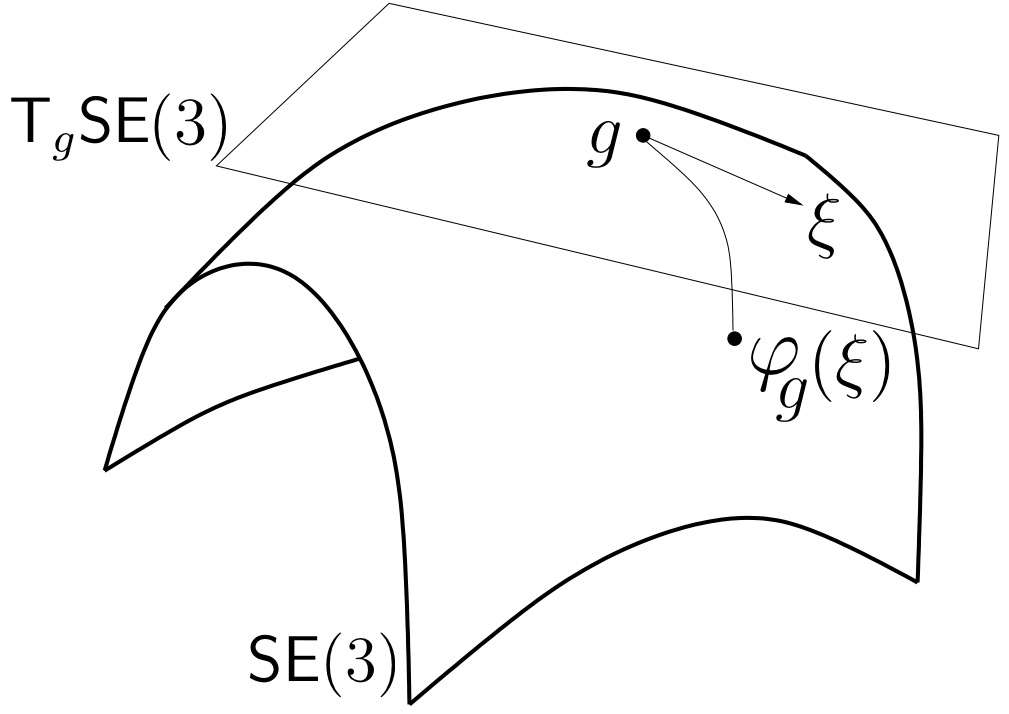 The objective of this proposal is the development of an SE(3)-based rigid body pose estimation scheme for unknown moments of inertia in a spacecraft. This estimator design will a) account for translation/rotation coupling, b) avoid singularity or non-uniqueness issues, c) gain high level of convergence, and d)account for system uncertainties.
The objective of this proposal is the development of an SE(3)-based rigid body pose estimation scheme for unknown moments of inertia in a spacecraft. This estimator design will a) account for translation/rotation coupling, b) avoid singularity or non-uniqueness issues, c) gain high level of convergence, and d)account for system uncertainties.
Categories: Graduate
-
Space Operations in the NAS: Analysis of Impacts to the Aviation Industry
The basic goal of the research is to understand impacts to aviation stakeholders of the National Airspace System (NAS) due to space launch activities. The focus of the research is to study impacts to general aviation (GA), particularly with respect to airports and airport users, near and around Cape Canaveral, FL. Further, several avenues will be assessed to determine what aspects of GA are impacted, where, when, how, and why. Data will be collected and analyzed in alternate methods other than the originally-proposed simulation and modeling. As an aside, per FAA input and following review of extant literature, impacts to GA have not been adequately researched. Until recently, the industry and the FAA have largely focused on impacts to airlines (Tinoco, Eudy, Cannon 2020). As a result, we believe this effort will lead to interesting outcomes and fill a much-needed gap in the literature.
Categories: Faculty-Staff
-
Langrangian Wind Tunnel
ERAU is supporting industry (i.e. Global Aerospace Corp.) in the development of a novel hypersonic wind tunnel by using high-fidelity computational fluid dynamcs.
GAC is leading development of a wind tunnel in which the test article is propelled thru the test section at hypersonic speeds using a novel, proprietary approach. Due to proprietary restrictions a simplistic version of the test article is illustrated below as it moves Mach 10 from right to left. Shock waves may be observed reflecting off tunnel walls. A Phase I Air Force STTR effort has been completed and Phase II is expected to begin in the near future.
Categories: Faculty-Staff
241-250 of 278 results