
The Advanced Dynamics and Control group focuses on the development and implementation of guidance, navigation and control of aerospace systems and research on a broad range of topics focused on flight dynamics.
The group supports activities aimed at advancing aviation and space technologies through the development of concepts, implementation and demonstration of solutions with research efforts that span several areas, including but not limited to: investigation of technologies to integrate UASs into the National Air Space; design of intelligent systems to increase aviation flight safety; application of robotic technologies for future space missions; fundamental and applied research in manned and unmanned aerospace systems including avionics and payload systems design, aircraft modeling and parameter identification, multiple sensor fusion, formation flight control, human-machine interface, and remote sensing.
The research group involves graduate and undergraduate students motivated to learn and performing research on a broad range of topics in Dynamics and Control.
Advancing Autonomous Flight Through Intelligent Systems
See how Embry-Riddle’s Advanced Dynamics and Control group is pushing aerospace forward with AI-driven autonomy, GPS-independent navigation and resilient system design. Watch how students and researchers collaborate across disciplines to solve complex challenges and build smarter, safer aircraft.
Research
Free-Flying Unmanned Robotic Spacecraft for Asteroid Resource Prospecting and Characterization
In this project, Embry‑Riddle Aeronautical University (ERAU) and Honeybee Robotics (HBR) are developing an integrated autonomous free-flyer robotic spacecraft system to support the exploration and subsequent resource utilization of asteroids as well as other planetary bodies and moons. The proposed spacecraft will address the first step towards In Situ Resource Utilization from Near Earth Object bodies; namely, it will prospect it with sample acquisition devices and characterize the NEO for ISRU potential. Embry‑Riddle and Honeybee Robotics are focused on an innovative resource prospecting mission concept based on autonomous small marsupial free-flyer prospector spacecraft. Such technologies are currently being developed at ERAU. The spacecraft will utilize unique technologies such as MicroDrills and Pneumatic Samplers previously developed under other SBIR projects by Honeybee Robotics. In particular, the proposal will focus on flight control and reconfiguration for guidance under extreme environments, vision-aided navigation approaches, and sampling systems design, testing and evaluation. The successful completion of the proposed research is anticipated to provide a theoretical and experimental framework to investigate the capabilities of a marsupial-based robotic system to explore and extract samples from terrains that would be inaccessible to traditional rover-type vehicles and where traditional flight guidance and navigation sensors, such as GPS receivers and magnetometers, are not functional.
Sponsors:
- National Aeronautics and Space Administration (NASA)
- SBIR/STTR Technologies
Mini Free-Flyer Spacecraft: Autonomous Motion in Microgravity
Watch two free-flying robotic spacecraft demonstrate independent attitude control and reorientation in a simulated space environment. This test highlights the control and navigation approaches being developed for autonomous asteroid prospecting and in-situ resource exploration.




 As space system technologies continue to progress, space systems will require more robust, online health monitoring systems that are capable of identifying and compensating for faults or threats to the system. Due to unforeseen circumstances and naturally occurring threats, an on-board fault diagnosis system for space vehicles capable of autonomous Threat Detection, Isolation, and Recovery (TDIR) is necessary to maintain space operations and mitigate operational gaps as mission complexities increase. Data-driven methods are being explored for FDIR in aerospace systems.
As space system technologies continue to progress, space systems will require more robust, online health monitoring systems that are capable of identifying and compensating for faults or threats to the system. Due to unforeseen circumstances and naturally occurring threats, an on-board fault diagnosis system for space vehicles capable of autonomous Threat Detection, Isolation, and Recovery (TDIR) is necessary to maintain space operations and mitigate operational gaps as mission complexities increase. Data-driven methods are being explored for FDIR in aerospace systems.
The ADCL lab has developed a health monitoring system tool that employs machine learning algorithms such as Support Vector Machine, incremental learning and the principle of self-nonself-discrimination to distinguish between nominal and failure data. This methodology addresses the complexity and multi-dimensionality of aerospace system dynamic response in the context of abnormal conditions and is aimed to assist spacecraft with recovery maneuvers in real-time.
Machine Learning-Based Fault Detection in Action
Watch how a machine learning model classifies system behavior in real time as operating conditions evolve. The shifting regions reveal how the model adapts its fault detection boundaries as more data is introduced.
Integrated Gravity Off-Loading Robotic System
The IGOR facility is an alternative solution for testing guidance and control algorithms of Aerospace Unmanned Systems where it is possible to have six degrees of freedom plus translation in all three axes. The system has the capability of carrying spacecraft using a cable and following its motion by using a X-Y tracking active system. It also has a gravity offload device that simulates reduced gravity, which allows different space environments to be simulated.
Sponsor:
- National Aeronautics and Space Administration (NASA)


IGOR System: Controlled Motion Testing
Watch the IGOR system execute precise, controlled movements along a defined path to demonstrate its motion capabilities. This test highlights how the platform tracks and responds to commanded inputs in real time.
Motion-Based Flight Simulator Research
 This motion-based six-degree-of-freedom flight simulator supports the design, development and testing of advanced intelligent algorithms to enhance aviation operational safety and technology. This device allows the validation and verification of advanced flight control systems and algorithms to preserve an acceptable level of safety during real flight operations. Another important area that this simulation tool supports is the analysis and evaluation of the pilot’s behavior and his/her interaction with onboard flight control mechanisms. This leads towards research and development to detecting pilot abnormal conditions or inadequate response, assessing adverse interactions with intelligent control laws, and developing mechanisms that can mitigate their effects through design and ad-hoc countermeasures.
This motion-based six-degree-of-freedom flight simulator supports the design, development and testing of advanced intelligent algorithms to enhance aviation operational safety and technology. This device allows the validation and verification of advanced flight control systems and algorithms to preserve an acceptable level of safety during real flight operations. Another important area that this simulation tool supports is the analysis and evaluation of the pilot’s behavior and his/her interaction with onboard flight control mechanisms. This leads towards research and development to detecting pilot abnormal conditions or inadequate response, assessing adverse interactions with intelligent control laws, and developing mechanisms that can mitigate their effects through design and ad-hoc countermeasures.
Sponsor:
- Florida Department of Education UAS Facility
Flight Simulator in Motion
A student tests a motion-based flight simulator as the cockpit tilts and rotates with him inside it. The shifting angles and responsive controls give a clear sense of how real-world flight dynamics are recreated in the lab.
Pilot-in-the-Loop Mobile Research Test Bed
This project aims at developing and implementing a Mobile UAV Ground Control Station (GCS). The system will support aviation safety research with pilot-in-the-loop capabilities using unmanned aerial systems platforms and where flight conditions, such as subsystems failures, could be simulated in real-time to characterize pilot response, control laws performance, and human-machine and control laws interactions. A fruitful achievement of this project will provide a platform to validate and assess new concepts and technologies that are beneficial for improving engineering fidelity of early systems integration testing based on pilots feedback and their interaction with on-board flight controls systems.
Sponsor:
- Embry‑Riddle College of Engineering





Resilient Multiagent Robotic Systems
Several mission applications that involve the deployment of groups of autonomous vehicles demand decentralized swarming capabilities and require advanced and novel technologies to increase overall mission performance, particularly if they are operating under complex and dynamically changing environments. These advanced autonomous systems based on single-agent or multi-agent cooperative networks require adequate intelligent systems to increase mission safety and optimize performance within complex, unstructured and dynamic operating environments. The purpose of this project is to develop intelligent algorithms to improve resilience of multi-agent systems (MAS). A general architecture inspired by the functioning of biological mechanisms is designed to increase autonomy in a swarm of unmanned aerial vehicles (UAVs) through self-learning, self-organizing and optimal flight trajectories. We demonstrate and evaluate on-board intelligent techniques at different levels by combining self-detection, self-diagnosis, self-recovery and self-organization as a means to increase the safety of swarm missions, optimize endurance and maintain performance within hazardous operating environments with minimal human intervention.
Sponsor:
- Internal Grant
Resilient Multiagent Drone Swarm in Flight
Watch a team of autonomous drones fly in coordinated formation using decentralized control and swarm intelligence. This demonstration shows how multi-agent systems maintain stability and performance while adapting to dynamic, real-world environments.
Intelligent Algorithms for Mission Protection of UAVs
The general objective of this research effort is the design, development and proof-of-concept demonstration through simulation and flight tests of intelligent algorithms for mission protection of aerial systems. The goal is to develop a UAV research platform with fully autonomous capabilities that would support broad areas of guidance, navigation and control technologies. This includes sensor fusion, vision-aid navigation, modeling and simulation of aerospace systems.
Intelligent Systems have been developed, implemented and tested in flight test using a 3DR quadcopter testbed. Through an autonomous decision-making process, the vehicle is capable of re-planning its trajectory in real time. Few capabilities the vehicle has are unknown obstacle avoidance, re-planning capabilities due to low battery in the system, re-planning capabilities if the system has an internal failure and more.
Further testing and design is in progress for a more robust autonomous intelligent system.
Sponsor:
- ERAU Student Internal Grant



This research focuses on autonomous spacecraft to not only identify and travel toward moving targets but also repair them, inspect them or assemble new objects entirely from scratch, using a vision-based navigation system that employs wireless communication for tracking and formation flight. The proposed algorithm also uses neural network-based machine learning to identify, track and estimate the positions and intent of other nearby flying agents. This research project was featured in the Embry-Riddle news article, "Eagle-Designed Space Drones Target In-Orbit Construction."
Sponsor:
- Award from the U.S. Air Force


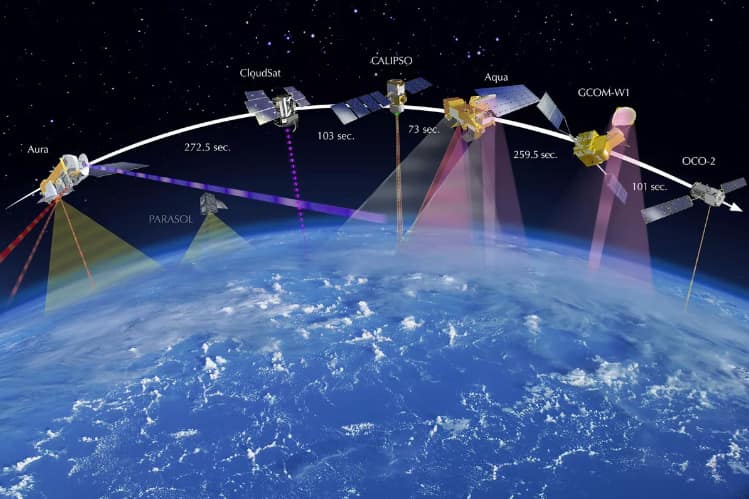
Flight Demonstration of Novel Atmospheric Satellite Concept
The Dual-Aircraft Platform (DAP) is a Phase II NASA Innovative and Advanced Concepts (NIAC) research effort investigating a novel concept for achieving a low-cost atmospheric satellite in the lower stratosphere, which utilizes a combination of wind and solar energy capture. DAP consists of two glider-like unmanned aircraft connected via a thin, ultra-strong cable. Long-duration flight simulations have shown the platform could literally sail without propulsion, using levels of wind shear persistently found near 60,000 feet, and substantially increase the energy available for useful payload operations. The central objective of the Phase II effort is to perform autonomous proof-of-concept flight demonstrations of the DAP concept using a small-scale prototype at low altitude. Related objectives are developing specific flight maneuvers and mechanisms required for station keeping and validating the autonomous guidance and control software.
Sponsors:
- National Aeronautics and Space Administration (NASA)
- SBIR/STTR Technologies


Cybersecurity Research of Unmanned Aerial Vehicles

This project, funded by the National Science Foundation (NSF), establishes a new Research Experiences for Undergraduates (REU) Site at Embry‑Riddle Aeronautical University. This project focuses on cybersecurity research for unmanned aerial vehicles (UAVs). Each summer, undergraduate students participate in research to understand cybersecurity challenges for UAVs and how to design algorithms and techniques to protect UAVs from cyber-attacks. Research activities in this project explore the cybersecurity of UAVs from multiple angles, including secure communication, data privacy protection, secure control systems for autonomous UAVs, etc.
This past summer, three students (two from ERAU and one from UNLV) initiated this project at ADCL. They were able to perform successful flight tests with a quadcopter that they had set up and commenced the design of a control system for cyber-attack detection in UAVs.
Sponsor:
- National Science Foundation
Test Flight
Watch an indoor test flight of the students' quadcopter.
Media
- The NASA SALA4 Project Team gathered for the official kickoff meeting at Embry‑Riddle Aeronautical University on October 21, 2025. The event featured productive technical discussions and opportunities to connect with colleagues across all partner institutions.
- Our research group is proud to lead a new NASA University Leadership Initiative (ULI) project focused on advancing the future of air mobility through increased autonomy and operational safety. This exciting effort brings together a strong collaborative team, including Georgia Tech, the University of Texas at Arlington, the University of Southern California, Collins Aerospace, and Argonne National Laboratory. Together, we aim to develop transformative technologies that will shape the next generation of intelligent and resilient air transportation systems. Read more about the NASA ULI project.
- We are thrilled to announce our most recent paper published in Acta Astronautica Journal, discussing the use of machine learning generative models to enhance the accuracy of vision-aided relative positioning in space proximity operations. Access the online publication.
- Our research work on mitigation of pilot-induced-oscillations using machine learning was recently highlighted by Embry-Riddle News! Learn more in Eagles Use AI to Improve Aviation Safety.
- We are very proud to announce that one of our graduate students, Gabriela Gavilanez, was recently named one of Aviation Week Network’s 20 Twenty Class of 2024. Big news! Congratulations, Gabriela! Follow this link to the press release.
- Our Ph.D. student Michael Budihartono attended AUVSI Conference and demonstrated the capabilities of Vicon system performing coordinated flight of multi-agent crazyflie system.
- Our group presented five conference papers at the AIAA SciTech Conference 2023, held in Baltimore, Maryland.
- Hever Moncayo was a Visiting Researcher at the NASA Jet Propulsion Laboratory during Summer 2022.
- Hever Moncayo is now AIAA Associate Fellow, Class of 2022.
- Research project sponsored by the U.S Air Force was featured in the Embry-Riddle News article, "Eagle-Designed Space Drones Target In-Orbit Construction."
- Our group presented five conference papers at the AIAA SciTech Conference 2022, held in San Diego, California.

- 2023. Festa D., Moncayo H., Aoun C., Gutierrez T., Distributed Intelligent Adaptive Controller for Disturbance Rejection in Multiagent Systems, AIAA Journal of Aerospace Information Systems; Number 1, (2023), https://doi.org/10.2514/1.I011162..
- 2022. Moncayo, H., Engblom. W., Nshuti, C., Coulter, N., Performance Analysis of Flight Control Laws Applied to a Simplified Analog of the Dual Aircraft Platform Concept, ASCE Journal of Aerospace Engineering, Journal of Aerospace Engineering, Vol. 35, Issue 4, July (2022). https://doi.org/10.1061/(ASCE)AS.1943-5525.0001439..
- 2021. Perez, A., Moncayo, H., Bio-Inspired Feedback Linearized Adaptive Control for a Thrust Vectoring Free-Flyer Vehicle, Journal of Intelligent and Robotic Systems, 102, 43 (2021). https://doi.org/10.1007/s10846-021-01408-z..
- 2020. Coulter, N., Moncayo, H., Comparison of Optimal and Bio-Inspired Adaptive Control Laws for Spacecraft Sloshing Dynamics, AIAA Journal of Spacecraft and Rockets; Volume 57, Number 1, (2020), https://doi.org/10.2514/1.A34473..
- 2019. Perhinschi M., Moncayo H., Book Chapter, Artificial Immune System for Comprehensive and Integrated Aircraft Abnormal Conditions Management, AIAA Book Advances in Computational Intelligence and Autonomy for Aerospace Systems, John Valasek (Ed), pg. 147-218, 2019. ISBN (print): 978-1-62410-478-7, eISBN: 978-1-62410-479-4, January, 2019..
- 2018. Garcia, D., Perez, A., Moncayo, H., Rivera, K., Betancur, Y., DuPuis, M., Mueller, R., Spacecraft Heath Monitoring Using a Biomimetic Fault Diagnosis Scheme, AIAA Journal of Aerospace Information Systems, (2018), Vol. 15, No. 7 (2018), pp. 396-413. doi: http://arc.aiaa.org/doi/abs/10.2514/1.I010612..
- 2017. Togayev A., Perhinschi M. G., Al Azzawi D., Moncayo H., Perez A., Immunity-based Accommodation of Aircraft Subsystem Failures, Aircraft Engineering and Aerospace Technology, 89/1 pp. 164-175, Emeral Publishing, 2017.
- 2016. Al Azzawi D., Moncayo H., Perhinschi M. G., Perez, A., Togayev, A., Comparison of Immunity-Based Schemes for Aircraft Failure Detection and Identification, Journal of Engineering Applications of Artificial Intelligence, Vol. 52, pp. 181-193, June 2016.
- 2016. Moncayo, H., Moguel, I., Perhinschi, I., Al Azzawi, D., Togayev, A., Perez, A., Structured Non-Self Approach for Aircraft Failure Identification within an Immunity-Based Fault Tolerance Architecture, The Aeronautical Journal, Volume 120, No. 1225, pp. 415-434; March, 2016.
- 2016. Perhinschi M. G., Al Azzawi D., Moncayo H., Perez A., Togayev A., Immunity-based Aircraft Actuator Failure Evaluation, Aircraft Engineering and Aerospace Technology, Vol. 88, no. 6, 2016, DOI: 10.1108/AEAT-07-2014-0117.R1.
- 2015. Perez A., Moncayo H., Perhinschi M. G., Al Azzawi D., Togayev A., A Bio-Inspired Adaptive Control Compensation System for an Aircraft Outside Bounds of Nominal Design, Journal of Dynamic Systems, Measurement and Control, ASME, Vol. 137, Sep, 2015.
- 2015. M. G. Perhinschi, D. Al Azzawi, H. Moncayo, A. Perez, Evaluation of Aircraft Sensor Failures Effects Using the Artificial Immune System Paradigm, International Review of Aerospace Engineering, Vol. 8, N.2, (2015), pp. 71-80.
- 2015. Al Azzawi D., Perhinschi M. G., Moncayo, H., Perez, A., A Dendritic Cell Mechanism for Detection, Identification, and Evaluation of Aircraft Failures, Journal of Control Engineering Practice, Elseiver, Vol. 41, August 2015, pp. 134-148.
- 2015. Perhinschi M. G., Al Azzawi D., Moncayo H., Togayev A., Perez A., Moguel I., Immunity-based Flight Envelope Prediction at Post-failure Conditions, Aerospace Science and Technology, Volume 46, Oct–Nov., 2015, Pages 264-272.
- 2014. Perhinschi M. G., Moncayo H., Al Azzawi, D., Moguel, I., Integrated Immunity-Based Framework for Aircraft Abnormal Conditions Management, AIAA Journal of Aircraft, Volume 51, Issue 6, pages 1726-1739, December 2014.
- 2014. Perhinschi M. G., Moncayo H., Bartlett A., Davis J., Wilburn B., Karas K., Neurally-augmented Immunity-based Detection and Identification of Aircraft Sub-system Failures. The Aeronautical Journal, Royal Aeronautical Society, Vol. 118, No. 1205, July 2014.
- 2014. Al Azzawi D., Perhinschi M. G., Moncayo H., Artificial Dendritic Cell Mechanism for Aircraft Immunity-Based Failure Detection and Identification, AIAA Journal of Aerospace Information Systems, Vol 11, No. 7, 2014, pp. 467-481.
- 2014. Perhinschi M. G., Moncayo H., Al Azzawi, D., Moguel, I., Generation of Artificial Immune System Antibodies Using Raw Data and Cluster Set Union, IC: International Journal of Immune Computation, Vol. 2, No. 1, pp. 1 ~ 15, 2014.
- 2013. Moncayo, H., Krishnamoorty,K., Wilburn, B., Wilburn, J., Perhinschi , M., Lyons, B. Performance Analysis of Fault Tolerant UAV Baseline Control Laws with L1 Adaptive Augmentation, Journal of Modeling, Simulation, Identification, and Control, Columbia International Publishing, Vol.1, No.4, pp. 137-163, 2013.
- 2013. Wilburn B., Perhinschi M. G., Moncayo H., Karas K., Davis J., Unmanned Aerial Vehicle Trajectory Tracking Algorithms Comparison, International Journal of Intelligent Unmanned Systems, Volume 1, Issue 3, 2013.
- 2013. Perhinschi M. G., Wilburn B., Davis J., Moncayo H., Karas K., Simulation Environment for UAV Fault Tolerant Autonomous Control Laws Development, Journal of Modeling, Simulation, Identification, and Control, Columbia International Publishing, Vol.1, No.4, pp. 164-195, 2013.
- 2011. Moncayo H., Perhinschi M. G., Davis J., Artificial Immune System Based Aircraft Failure Evaluation over Extended Flight Envelope, AIAA Journal of Guidance, Control, and Dynamics, Vol. 34, No. 4, Jul./Aug. 2011.
- 2011. Perhinschi M. G., Porter J., Moncayo H., Davis J., Wayne W. S., Artificial Immune System-Based Detection Scheme for Aircraft Engine Failures, AIAA Journal of Guidance, Control, and Dynamics, Vol. 34, No. 5, Sep/Oct. 2011.
- 2011. Moncayo H., Perhinschi M. G., Davis J., Artificial Immune System Based Aircraft Failure Detection and Identification over Extended Flight Envelope, The Aeronautical Journal, Royal Aeronautical Society, Volume 115, No. 1163, January, 2011.
- Sisson, N., and Moncayo., H. Machine Learning Based Architecture for Generation of Synthetic Flight Test Data, AIAA 2023-1814. AIAA SciTech 2023 Forum. National Harbor, MD. January 2023..
- Gutierrez, T., Coulter, C., Moncayo, H., Nakka, Y., Choi, C., Rahmani, A., and Gupta, A., Data-driven Health Management System for Multi-Spacecraft Formation Flying, AIAA 2023-0129. AIAA SciTech 2023 Forum. National Harbor, MD. January 2023.
- Morillo, E. and Moncayo., H. On-board Artificial Intelligence for Failure Detection and Safe Trajectory Generation, AIAA 2023-1081. AIAA SciTech 2023 Forum. National Harbor, MD. January 2023..
- Cuenca, A. and Moncayo, H. Geomagnetic Aided Navigation using Rao Blackwellized Particle Filter, AIAA 2023-1452. AIAA SciTech 2023 Forum. National Harbor, MD. January 2023..
- Cuenca, A., Gutierrez, T., Morillo, E., Steinfeldt, S., and Moncayo, H., Modeling of GPS Degradation Conditions for Risk Assessment of UAS Operations in Urban Environments, AIAA 2023-2648. AIAA SciTech 2023 Forum. National Harbor, MD. January 2023..
- F. D., Moncayo, H., Aoun, C., Gutierrez, T., Comparison of an Adaptive-Immunized and an Adversarial Deep Learning Control Laws to Increase Resiliency in Distributed Cyber-Physical Systems, GNC-39/IS-26, Guidance and Control Architectures for Autonomous Systems IX, AIAA SciTech Conference, January 2022, San Diego, Ca..
- Coulter, N., Moncayo, H., Artificial Immune System Optimized Support Vector Machine for Satellite Fault Detection, GNC-35/IS-24, Guidance and Control Architectures for Autonomous Systems VIII, AIAA SciTech Conference, January 2022, San Diego, Ca..
- Aoun, C., Moncayo, H., Observer-based Deep Reinforcement Learning Control and the Application to a Nonlinear High-Order Dynamic System, GNC-30/IS-21, Guidance and Control Architectures for Autonomous Systems VII, AIAA SciTech Conference, January 2022, San Diego, Ca..
- Gutierrez, T., Cuenca, A., Coulter, N., Moncayo, H., Steinfeldt, B., Development of a Simulation Environment for Validation and Verification of Small UAS Operations, GNC-02/IS-02, Guidance, and Control Architectures for Autonomous Systems I, January 2022, San Diego, Ca..
- Cuenca, A., Moncayo, H., Machine Learning Application to Estimation of Magnetospheric Contributions for Geomagnetic-based Navigation, GNC-35/IS-24, Guidance and Control Architectures for Autonomous Systems VIII, AIAA SciTech Conference, January 2022, San Diego, Ca..
- Coulter, N., Moncayo, H., An Online Machine Learning Paradigm for Spacecraft Fault Detection. AIAA SciTech Conference, Guidance, Navigation, and Control, Invited Session, January, 2021, Virtual..
- F. D., Moncayo, H., Immunity-based Consensus Algorithm for Increased Resilience in Multiagent Missions,AIAA SciTech Conference, Guidance, Navigation, and Control, Invited Session, January, 2021, Virtual..
- Cuenca, A., Moncayo, H., A Geomagnetic-based Integrated Architecture for Dead-Reckoning Navigation. AIAA SciTech Conference, Guidance, Navigation, and Control, Invited Session, January, 2021, Virtual..
- Bakori, M., Moncayo, H., Comparison of Discrete Direct and Indirect Adaptive Control Laws for UAV Fault-tolerance. AIAA SciTech Conference, Guidance, Navigation, and Control, Invited Session, Advances in Feedback Control Architectures for Autonomous Systems, January, 2021, Virtual..
- Betancur, Y., Moncayo, H., Spacecraft Testbed to Support Control System Design for Space Missions. AIAA SciTech Conference, Guidance, Navigation, and Control, Invited Session, January, 2021, Virtual..
- F. D., Moncayo, H., Hybrid Immunized Swarm Optimization Concept for Resilient Coordinated Missions, AIAA SciTech Conference, January, 2020, Orlando Florida.
- Bakori, M., Moncayo, H., UAS Model Identification and Simulation to Support In-Flight Testing of Discrete Adaptive Fault-Tolerant Control Laws, AIAA SciTech Conference, January, 2020, Orlando Florida..
- Irigireddy, S., Moncayo, H., Rivera, K., Vision Based Relative Navigation for Close-Formation Flight Missions, AIAA SciTech Conference, January, 2020, Orlando Florida..
- Verberne, J., Moncayo, H., Comparison of Adaptive Control Laws for Wind Rejection in Quadrotor UAVs, ASME Dynamic Systems and Control Conference, Park City, Utah, Oct. 2019..
- Rivera, K., Moncayo, H., Verberne, Johannes, F, D. Design and Implementation of Intelligent Decision-Making Algorithms for Unmanned Aerial Vehicles Mission Protection, AIAA Science and Technology Forum and Exposition, Jan. 2019, San Diego, California..
- Verberne, J., Betancur, A., Rivera, K., Coulter., N., Moncayo, H., Comparison of MRAC and L1 Adaptive Controllers for a Gimbaled Mini-Free Flyer, AIAA Science and Technology Forum and Exposition, Jan. 2019, San Diego, California.
- Betancur, A., Memon, W., Moncayo, H., Design and Development of a Test Bed with Active Tracking Control to Support Gravity Off-loading, AIAA Science and Technology Forum and Exposition, Jan. 2019, San Diego, California.
- Coulter, N., Moncayo, H., Comparison of Optimal and Bio-Inspired Adaptive Control Laws for a Spacecraft with Fuel Slosh Dynamics, AIAA Science and Technology Forum and Exposition, Jan. 2019, San Diego, California..
- Coulter, N., Moncayo, H., Engblom, W., Virtual Demonstration of a Novel Stratospheric Dual Aircraft Platform Concept, AIAA Aviation and Aeronautics Forum and Exposition, Modeling and Simulation Technologies Conference, Atlanta, Georgia, June, 2018..
- Coulter, N., Moncayo, H., Engblom, W., Evaluation and Comparison of Sailing Flight Optimization Algorithms for a Stratospheric Dual Aircraft Platform Concept, AIAA Aviation and Aeronautics Forum and Exposition, Modeling and Simulation Technologies Conference, Atlanta, Georgia, June, 2018.
- Nshuti, C., Moncayo, H., Engblom, W., F, D., Modeling, Simulation and Flight Testing to Support Proof of a Stratospheric Dual Aircraft Platform Concept, AIAA SciTech Conference, UAS Missions and Applications II, Orlando, FL, January, 2018.
- Garcia, D., Perez, A.,Moncayo, H., Rivera, K., Dupuis, M., Mueller, R., Spacecraft Heath Monitoring Using a Biomimetic Fault Diagnosis Scheme, SciTech Conference, Grapevine, Texas, Jan., 2017.
- Garcia, D., Moncayo, H., Perez, A., Jain, C., Low Cost Implementation of a Biomimetic Approach for UAV Health Management, American Control Conference, Boston, Ma. July 3 to 6, 2016
- Perez, A., Moncayo, H., Prazenica, R., Zacny, K., Mueller, R., Dupuis, M., Ebert, T., Free-Flying Robotic System for Interplanetary Prospecting and In Situ Resource Utilization, ASCE Earth and Space 2016 Conference, Orlando, FL.
- Perez, A., Moncayo, H., Prazenica, R., Zacny, K., Mueller, R., Dupuis, M., Ebert, T., Control Laws Development for a Free-Flying Unmanned Robotic System to Support Interplanetary Bodies Prospecting and Characterization Missions, SciTech Conference, GNC, Aerospace Robotics and Unmanned/Autonomous Systems IV, January 5, 2016.
- Zacny, K., Yaggi, B., Spring, J., Chu, P., Mueller, R., Ebert, T., Dupuis, M., Moncayo, H., Prazenica, R., Sample Acquisition Systems for a Free-Flying Unmanned Robotic System to Support Interplanetary Bodies Prospecting and Characterization Missions, SciTech Conference, Extraterrestrial Water: Prospecting and Acquisition, January 4, 2016.
- Moncayo, H., Prazenica, R., Zacny, K., Free-Flyer Robotic Spacecraft for Exploration and In Situ Resource Utilization of Interplanetary Bodies, 5Th International Workshop on Lunar Surface Applications, Lunar Landers, Lunar Surface Science and Lunar ISRU, April, 2015, Cocoa Beach, FL.
- Stansbury, R., Moncayo, H., Currier, P., A Graduate Program in Unmanned and Autonomous Systems Engineering, ASEE Southeast Section Conference, American Society for Engineering Education, Seattle, WA, 2015
- Perez, A., Moncayo, H., Togayev, A., Perhinschi, M., Al Azzawi, D., Pilot-in-the-Loop Evaluation of a Bio-Inspired Adaptive Fault Tolerant Control System in a Motion Based Flight Simulator, AIAA Guidance, Navigation, and Control Conference, AIAA Science and Technology Forum, Orlando, FL., January 2015.
- Moguel, I; Moncayo, H., Perez, A; Perhinschi, M., In-Flight Testing of a Bio-Inspired Approach for Assessment of an UAV Outside Bounds of Nominal Design, AIAA Infotech at Aerospace, AIAA Science and Technology Forum Orlando, FL., January 2015.
- Chan, M., Moncayo, H., Perez, A, Prazenica, R, Kim, D., Azizi, B., Development and Flight Testing of an Unmanned Aerial System with Micro-Fiber Composite Actuators, AIAA Infotech at Aerospace, AIAA Science and Technology Forum Orlando, FL., January 2015.
- Anderson, A., Moncayo, H., Prazenica, R., Mirmirani, M., Noriega, A., Burnett, B., Gehlot, V., Kern, Z., Development of a Surrogate Autonomous Aircraft for Entry in the NASA Airspace Operation Challenge, AIAA Infotech at Aerospace, AIAA Science and Technology Forum Orlando, FL., January 2015.
- Perez A. E., Moncayo H., Moguel I., Perhinschi M. G., Al Azawii D., Togayev A., Immunity-based Adaptive Control Laws for Aircraft Fault Tolerance, ASME Annual Dynamic Systems and Control Conference, San Antonio, Texas, Oct. 2014.
- Togayev A., Perhinschi M. G., Al Azawii D., Moncayo H., Moguel I., Perez A. E., Immunity-Based Abnormal Condition Accommodation of Aircraft Sub-system Failures, ASME Annual Dynamic Systems and Control Conference, San Antonio, Texas, Oct. 2014.
- Perez A. E., Moguel I., Moncayo H., Chan C. May; Low Cost Autopilot System for an Autonomous Unmanned Aerial System, International Conference and Exhibition on Mechanical and Aerospace Engineering, Philadelphia, Pennsylvania, Sept. 2014.
- Al Azawii D., Perhinschi M. G., Togayev A., Moncayo H., Moguel I., Perez A. E., Evaluating Aircraft Abnormal Conditions Using an Artificial Dendritic Cell Mechanism, International Conference and Exhibition on Mechanical and Aerospace Engineering, Philadelphia, Pennsylvania, Sept. 2014.
- Moguel I., Moncayo H., Perhinschi M. G., Al Azawii D., Perez A. E., Togayev A., Biologically-Inspired Approach for Aircraft Management under Upset Conditions, International Conference and Exhibition on Mechanical and Aerospace Engineering, Philadelphia, Pennsylvania, Sept. 2014.
- Prazenica, R., Kim, D., Moncayo, H., Azizi, B., Chan, M., Design, Characterization, and Testing of Macro-Fiber Composite Actuators for Integration on a Fixed-Wing UAV, Active and Passive Smart Structures and Integrated Systems VIII, SPIE Conference, March 2014.
Gallery



















Our People

Associated Labs & Facilities
- Daytona Beach College of Engineering
- Daytona Beach Campus
- The Advanced Dynamics and Control Lab (ADCL) supports research activities aimed at advancing aviation and space technologies.
Related Resources
Contact Us
Hever MoncayoGroup Director
MicaPlex 107 and 108, LB 231
Daytona Beach, FL 32114